
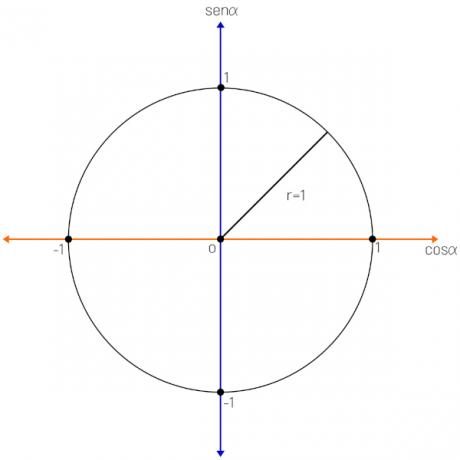
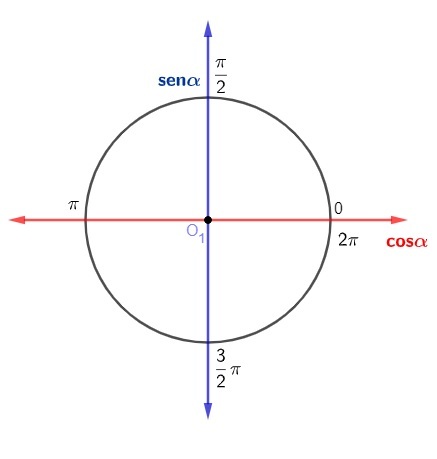
วงกลมตรีโกณมิติ เป็นวงกลมรัศมี 1 แทนในรูป เครื่องบินคาร์ทีเซียน. ในนั้นแกนนอนคือแกนโคไซน์และแกนตั้งคือแกนไซน์ เรียกอีกอย่างว่าวัฏจักรตรีโกณมิติ
ใช้ในการศึกษาอัตราส่วนตรีโกณมิติ ด้วยเหตุนี้จึงเป็นไปได้ที่จะเข้าใจเหตุผลหลักตรีโกณมิติสำหรับ มุม มากกว่า180º กล่าวคือ ไซน์ โคไซน์ และแทนเจนต์
อ่านด้วย: 4 ข้อผิดพลาดที่พบบ่อยที่สุดในตรีโกณมิติพื้นฐาน
ทีละขั้นตอนเพื่อสร้างวงกลมตรีโกณมิติ
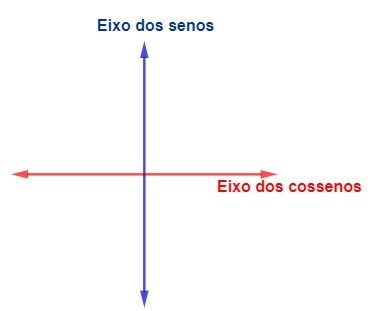
ในการสร้างวงกลมตรีโกณมิติ เราใช้สองแกนหนึ่งแนวตั้งและหนึ่งแนวนอนเช่นระนาบคาร์ทีเซียน แกนนอนเรียกว่า แกนโคไซน์, และแกนตั้งเรียกว่า แกนไซน์.
ด้วยการสร้างแกน ลองวาดกราฟของวงกลมที่มีรัศมี 1
อัตราส่วนตรีโกณมิติในวงกลม
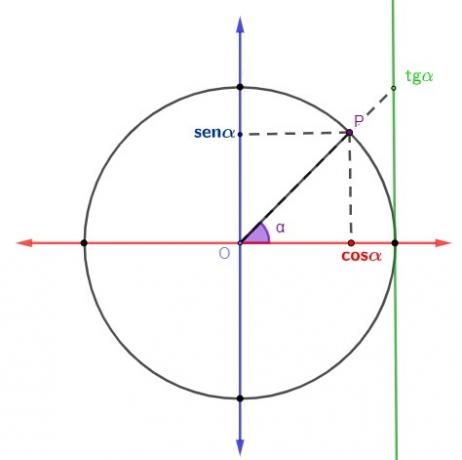
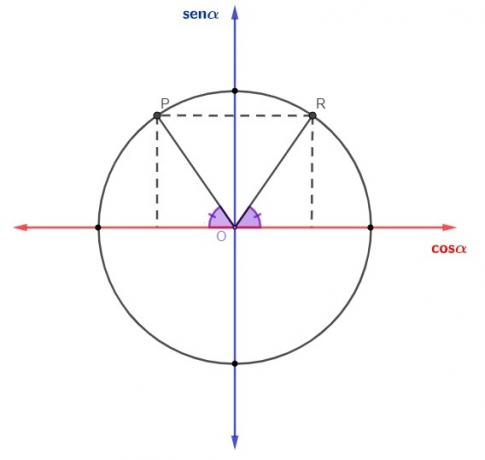
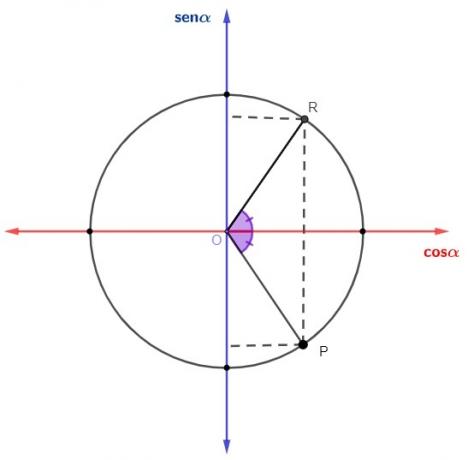
เราใช้วงกลมเพื่อหาค่าของ ไซน์ โคไซน์ และแทนเจนต์ตามค่ามุม มีใน แกนตั้ง ค่าไซน์ และบนแกนนอน ค่าโคไซน์โดยการกำหนดมุมบนวงกลมตรีโกณมิติ เป็นไปได้ที่จะหาค่าของไซน์และโคไซน์โดยการวิเคราะห์ พิกัดของจุดที่ส่วนของเส้นตรงเชื่อมจุดศูนย์กลางของวงกลมกับเส้นรอบวง ซึ่งแสดงโดย P ในภาพ a ทำตาม หากเราวาดเส้นสัมผัสไปยังวงกลมที่จุด (1.0) เราก็สามารถคำนวณแทนเจนต์ของมุมนี้ด้วยการวิเคราะห์ตามภาพ:
อ่านด้วย: ซีแคนต์ โคซีแคนต์ และโคแทนเจนต์คืออะไร
เรเดียนวงกลมตรีโกณมิติ
เรารู้ว่าส่วนโค้งสามารถวัดได้โดยใช้หน่วยวัดที่แตกต่างกันสองหน่วย: การวัดเป็นองศาและหน่วยวัดใน เรเดียน. เรารู้ว่า เส้นรอบวงคือ360º และความยาวของส่วนโค้งของคุณคือ2π:
จตุภาคของวงกลมตรีโกณมิติ
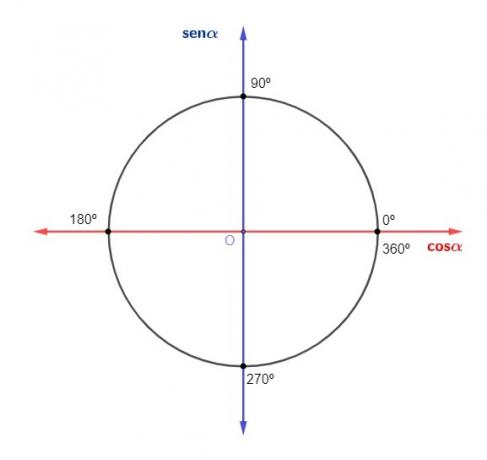
ไม่ว่าจะเป็นเรเดียนหรือองศา เป็นไปได้ที่จะกำหนดควอแดรนต์ที่ส่วนโค้งที่กำหนดตั้งอยู่ตามการวัด
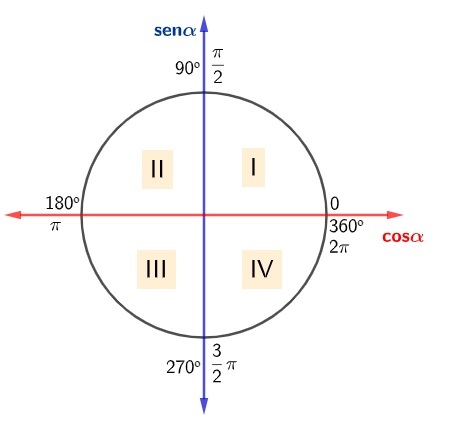
การวิเคราะห์วัฏจักร เราต้อง:
จตุภาคแรก: มุมที่อยู่ระหว่าง 0 ถึง 90° หรือ 0 ถึง π/2 เรเดียน
จตุภาคที่สอง: มุมที่อยู่ระหว่าง 90° ถึง 180° หรือ π/2 และ π เรเดียน
จตุภาคที่สาม: มุมที่อยู่ระหว่าง 180º ถึง 270º หรือ π และ 3 π/2 เรเดียน
จตุภาคที่สี่: มุมที่อยู่ระหว่าง 270° ถึง 360° หรือ 3π/2 และ 2π เรเดียน
อ่านด้วย: ลักษณะและคุณสมบัติของแผน
มุมที่โดดเด่นในวงกลมตรีโกณมิติ
ในช่วงเริ่มต้นของการศึกษา ตรีโกณมิติเราได้เรียนรู้ว่ามุมที่โดดเด่นคือมุม 30º, 45º และ 60º ซึ่งมีค่าของไซน์ โคไซน์ และแทนเจนต์ที่รู้จัก อย่างไรก็ตาม เนื่องจากความสมมาตรของวัฏจักรตรีโกณมิติ เป็นไปได้ที่จะหาค่าไซน์และโคไซน์สำหรับมุมเหล่านี้และมุมสมมาตร แก่เขาในแต่ละด้าน

สัญญาณวงกลมตรีโกณมิติ
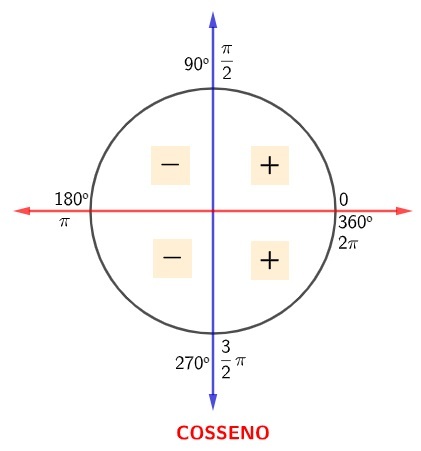
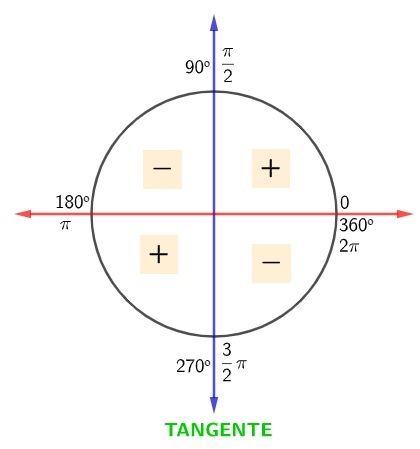
เพื่อให้เข้าใจว่าอะไรคือเครื่องหมายของอัตราส่วนตรีโกณมิติแต่ละตัวในวงจร การวิเคราะห์ค่าแกนในระนาบคาร์ทีเซียนก็เพียงพอแล้ว
เริ่มจากโคไซน์กันก่อน เนื่องจากเป็นแกนนอน โคไซน์ของมุมที่อยู่ทางด้านขวาของแกนตั้งจึงเป็นค่าบวก และโคไซน์ของมุมที่อยู่ทางด้านซ้ายของแกนตั้งจะเป็นค่าลบ
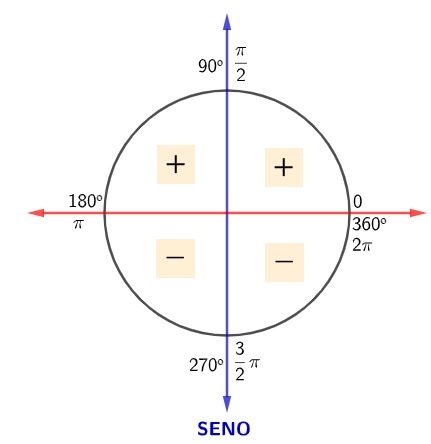
ทีนี้ เพื่อทำความเข้าใจเครื่องหมายไซน์ของมุม จำไว้ว่าแกนตั้งคือแกนไซน์ ดังนั้นไซน์ของมุมที่อยู่เหนือแกนนอนจึงเป็นบวก แต่ถ้ามุมต่ำกว่าแกนนอน ไซน์ของมุมนี้เป็นลบ ดังแสดงในภาพต่อไปนี้:
เรารู้ว่า แทนเจนต์คืออัตราส่วนระหว่างไซน์และโคไซน์จากนั้น เพื่อหาเครื่องหมายแทนเจนต์สำหรับแต่ละจตุภาค เราเล่นเกมเครื่องหมาย ซึ่งทำให้แทนเจนต์เป็นบวกในจตุภาคคี่และลบในจตุภาคคู่:
อ่านด้วย: กึ่งตรงกึ่งระนาบและกึ่งสเปซคืออะไร?
สมมาตรในวงกลม
วิเคราะห์วัฏจักรตรีโกณมิติ เป็นไปได้ที่จะสร้างวิธีการลดไซน์ โคไซน์ และแทนเจนต์เป็นจตุภาคแรก. การลดลงนี้หมายถึงการหามุมที่สมมาตรกับมุมของจตุภาคอื่นในจตุภาคแรก เพราะเมื่อเราทำงานกับมุมสมมาตร ค่าอัตราส่วนตรีโกณมิติจะเท่ากัน เปลี่ยนเฉพาะ สัญญาณ.
การลดมุมที่อยู่ในจตุภาคที่ 2 เป็นจตุภาคที่ 1
เริ่มจากมุมที่อยู่ในจตุภาคที่ 2 เราต้อง:
ดังที่เราทราบ ในจตุภาคที่ 1 และ 2 ไซน์เป็นบวก ดังนั้น ในการคำนวณการลดไซน์จากจตุภาคที่ 2 เป็นจตุภาคที่ 1 เราใช้สูตร:
บาป x= บาป (180º - x)
โคไซน์และแทนเจนต์ในจตุภาคที่ 2 เป็นลบ เพื่อลดโคไซน์จากจตุภาคที่ 2 เป็นจตุภาคที่ 1 เราใช้สูตร:
cosx = – cos (180º – x)
tg x = – tg (180º – x)
ตัวอย่าง:
ค่าไซน์และโคไซน์ของมุม 120° คืออะไร?
มุม 120° เป็นมุมที่สองในจตุภาคที่อยู่ระหว่าง 90° ถึง 180° เพื่อลดมุมนี้เป็นจตุภาคที่ 1 เราคำนวณ:
บาป 120 ° = บาป (180° – 120 °)
บาป120º = บาป60º
มุม 60° เป็นมุมที่น่าทึ่ง จึงทราบค่าไซน์ของมัน ดังนั้น:

ทีนี้มาคำนวณโคไซน์ของคุณกัน:
cos 120º = – cos (180 – 120)
cos 120º = - cos 60º
ดังที่เราทราบโคไซน์ของ60º เราต้อง:
การลดมุมที่อยู่ในจตุภาคที่ 3 เป็นจตุภาคที่ 1
เช่นเดียวกับในจตุภาคที่ 2 มีความสมมาตรระหว่างมุมในจตุภาคที่ 3 กับมุมในจตุภาคที่ 1
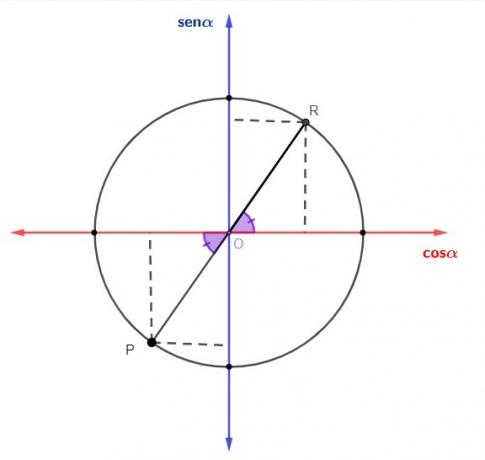
ไซน์และโคไซน์ในจตุภาคที่สามเป็นลบ ดังนั้น เพื่อลดไซน์และโคไซน์จากจตุภาคที่ 3 เป็นจตุภาคที่ 1 เราใช้สูตร:
บาป x = – บาป (x – 180º)
cosx = – cos (x – 180º)
แทนเจนต์ในจตุภาคที่ 3 เป็นบวก เพื่อลดขนาดเราใช้สูตร:
tg x = tg (x – 180º)
ตัวอย่าง:
คำนวณไซน์ โคไซน์ และแทนเจนต์ของ225º
บาป 225º = – บาป (225º – 180º)
บาป225º = – บาป45º
เนื่องจาก 45º เป็นมุมที่น่าทึ่ง เมื่อพิจารณาตาราง เราต้อง:
ทีนี้ การคำนวณโคไซน์ เราต้อง:
tg 225º = tg (225º - 180º)
tg 225º = tg 45º
เรารู้ว่าtg45º = 1 ดังนั้น:
tg 225º = 1
การลดมุมที่อยู่ในจตุภาคที่ 4 เป็นจตุภาคที่ 1
ด้วยเหตุผลเดียวกันกับการลดลงครั้งก่อน มีความสมมาตรระหว่างจตุภาคที่ 4 และที่ 1:
ค่าไซน์และแทนเจนต์ในจตุภาคที่ 4 เป็นลบ ดังนั้นในการลดลงจากส่วนที่ 4 เป็นจตุภาคที่ 1 เราใช้สูตร:
บาป x = – บาป (360º – x)
tg x = – tg (360º – x)
โคไซน์ในจตุภาคที่ 4 เป็นบวก ดังนั้น ในการลดลงเป็นจตุภาคที่ 1 สูตรคือ:
cos x = cos (360º - x)
ตัวอย่าง:
คำนวณค่าของไซน์และโคไซน์ที่330º
เริ่มต้นด้วยไซน์:
ตอนนี้กำลังคำนวณโคไซน์:
อ่านด้วย: วิธีการคำนวณระยะทางระหว่างจุดสองจุดในอวกาศ?
แบบฝึกหัดการแก้ไขวงกลมตรีโกณมิติ
คำถามที่ 1 - ระหว่างการศึกษาโมเมนต์วงกลม นักฟิสิกส์วิเคราะห์วัตถุที่หมุนรอบตัวตัวเอง เกิดเป็นมุม 15,240º เมื่อวิเคราะห์มุมนี้ ส่วนโค้งที่เกิดจากมุมนี้จะอยู่ใน:
A) จตุภาค I.
B) จตุภาค II
C) จตุภาค III
D) จตุภาค IV
E) บนแกนใดแกนหนึ่ง
ความละเอียด
ทางเลือก ข.
เรารู้ว่าทุกๆ 360° วัตถุนี้สร้างวงกลมรอบตัวเองจนครบ เมื่อดำเนินการ แผนก จาก 15,240 คูณ 360 เราจะพบว่าวัตถุนี้หมุนรอบตัวเองได้ทั้งหมดกี่รอบ แต่ความสนใจหลักของเราอยู่ที่ส่วนที่เหลือ ซึ่งแสดงถึงมุมที่มันหยุด
15.240: 360 = 42,333…
ผลลัพธ์แสดงให้เห็นว่าเขาหมุนตัวเอง 42 รอบ แต่ 360 · 42 = 15.120 ดังนั้นเขาจึงทิ้งมุมของ:
15.240 – 15.120 = 120º
เรารู้ว่า 120° เป็นมุมที่สองในจตุภาค
คำถามที่ 2 - โปรดตัดสินข้อความต่อไปนี้:
I → เมื่อคำนวณ tg 140º ค่าจะเป็นลบ
II → มุม 200° เป็นมุมของจตุภาคที่ 2
III → Sen 130º = บาป50º
ทำเครื่องหมายทางเลือกที่ถูกต้อง:
A) มีเพียงฉันเท่านั้นที่เป็นเท็จ
B) มีเพียง II เท่านั้นที่เป็นเท็จ
C) มีเพียง III เท่านั้นที่เป็นเท็จ
D) ทั้งหมดเป็นความจริง
ความละเอียด
ทางเลือก ข.
I → จริง เนื่องจากมุม 140º อยู่ในจตุภาคที่ 2 ซึ่งแทนเจนต์เป็นลบเสมอ
II → เท็จ เนื่องจากมุม 200° เป็นมุมของจตุภาคที่ 3
III → จริง เพราะหากต้องการลดมุมจากจตุภาคที่ 2 เป็นจตุภาคที่ 1 เพียงคำนวณผลต่าง 180° – x แล้ว:
บาป 130° = บาป (180° – 130°)
บาปที่ 130 = บาปที่ 50
โดย Raul Rodrigues de Oliveira
ครูคณิตศาสตร์
ที่มา: โรงเรียนบราซิล - https://brasilescola.uol.com.br/matematica/simetria-no-circulo-trigonometrico.htm


