BevegelsejevntDiverse (MUV) er en bevegelse der endring av hastighet, kalt akselerasjon, forekommer med konstant hastighet. Den jevnt varierte bevegelsen er en spesielt tilfelle avbevegelseDiverse. I denne, varierer hastigheten bare, mens i denne hastigheten variererimåtekonstant, det vil si at dens størrelse gjennomgår like store økninger eller avtakelser hvert sekund.
Seogså: Alt du trenger å vite om Newtons lover
Introduksjon til jevnt variert bevegelse
Når et møbel utvikler en jevn variert bevegelse, er hastigheten øke eller vil stadig reduseres, hvert sekund. Når denne hastigheten øker, sier vi at dens bevegelse er akselerert; når det avtar, sier vi at bevegelsen er tilbakestående.
Den jevnt varierte bevegelsen kan beskrives ved hjelp av timefunksjoner, ligner de som brukes til jevn bevegelse, og er mer generelle. Også, for å løse noen øvelser knyttet til denne typen bevegelse, er det nødvendig å forstå betydningen bak grafikken til posisjon og hastighet. Derfor skal vi studere de forskjellige MUV-tidsfunksjonene samt deres respektive grafiske fremstillinger.
Først skal vi håndtere hastighetsfunksjonen per time, som også kan skrives i form av formelen som brukes til å beregne gjennomsnittlig akselerasjon, se:

vF og du0 - endelige og innledende hastigheter (m / s)
De - akselerasjon (m / s)
t - tidsintervall (er)
Formelen viser at hastigheten til en rover varierer lineært med akselerasjonen, det vil si forutsatt at en kropp har en akselerasjon på 3 m / s², vil hastigheten øke med 3 m / s hver sekund.
Hvis vi tar hensyn til formatet til stillingens timefunksjon, vil vi se at det er en første graders funksjon som y = a + bx, kjent som rett ligning. I tilfelle av hastighetsfunksjonen per time, kalles koeffisienten a lineær koeffisient, og starthastighet av mobilen, mens koeffisienten b, kjent som vinkelkoeffisient, og akselerasjon av dette møbelet.
I den følgende figuren tar vi en hastighetsgraf som en funksjon av tid v (t), sjekk:
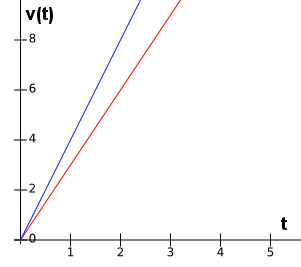
I grafen ser vi to linjer, en rød og en blå, som representerer bevegelsen til to møbler. Disse dra hjemmefra (v0 = 0) og begynn å akselerere jevnt. Ett sekund etter avgang har den blå roveren en hastighet på 4 m / s, mens den røde roveren er på 2 m / s. Når man analyserer skråningen til de rette linjene, er det lett å se at akselerasjonen til den blå roveren er større enn den for den røde roveren.
Se også:Sjekk ut fantastiske fakta om solsystemet
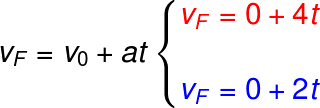
Det er mulig å se, basert på avlesningen av grafen, at hastigheten på mobilen i blått øker med 4 m / s, hver andre, mens hastigheten på mobil B øker med bare 2m / s, for det samme intervallet på tid. På denne måten kan vi skrive timefunksjonene til bevegelsene representert av de blå og røde linjene, sjekk:
Nedenfor viser vi hva formatet på diagrammet til a akselerert jevnt variert bevegelse og tilbakestående i henholdsvis rød og blå. For begge vil vi vedta en innledende hastighet som ikke er null:
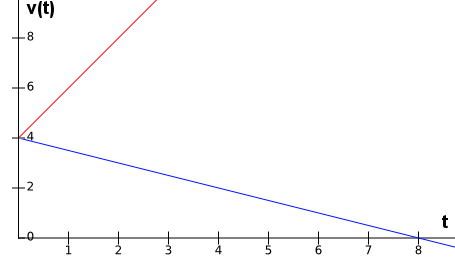
Merk at den forsinkede bevegelsen, representert av den blå linjen, reverserer betydningen på tidspunktet t = 8 s, siden hastigheten begynner å anta negative verdier.
Seogså: Lær å løse øvelser på ensartet bevegelse
I tillegg til å få mobilakselerasjonen, basert på hastighetsgrafene, er det også mulig det beregne avstanden mobilen har reist. For dette må vi beregne arealet av grafen under linjen. Dette området kan lett bli funnet med tanke på trapesområde og kan oppnås direkte ved hjelp av følgende formel, spesielt nyttig når mobil akselerasjon ikke er kjent:
I tillegg til timefartfunksjonen bruker MUV posisjonstimefunksjoner. Disse er andregrads funksjoner, siden forskyvningen av en mobil i MUV er proporsjonal med det kvadratiske tidsintervallet. Sjekk nå posisjons- og forskyvningsligningene for MUV:

sF - endelig posisjon
s0 - startposisjon
v0 - starthastighet
S - forskyvning
Slike ligninger ligner andregradsfunksjoner av typen ax² + bx + c = 0. I disse timefunksjonene av posisjon og forskyvning, O koeffisientDeer lik à a / 2 (akselerasjon delt med to), som multipliserer begrepet t², mens hastighetførste (v0) representerer koeffisientB.
Basert på dette vil vi vise deg hvordan den jevnt varierte bevegelsesgrafikken ser ut for de akselererte, i røde og forsinkede tilfellene i blått, med utgangspunkt i en starthastighet som ikke er null:

Når man analyserer denne grafen, er det mulig å se at for den akselererte bevegelsen i rødt paravollens konkavitet vender oppover, siden akselerasjonen er positiv, mens for forsinket bevegelse, i blått, paravollens konkavitet er vendt nedover, fordi akselerasjonen gir den motsatte retningen til den opprinnelige hastigheten.
Timefunksjonene som ble brukt til å danne grafene, representert av henholdsvis de røde og blå kurvene, samt deres verdier av posisjon, hastighetførste og akselerasjon er vist nedenfor:

Torricelli ligning
DE Torricelli ligning er veldig nyttig når vi trenger å løse et problem relatert til bevegelsejevntDiverse og vi vet ikke på hvilket tidsintervall det skjedde. Denne ligningen kan enkelt oppnås basert på timefunksjonene til posisjon og hastighet.
Sjekk ut formelen for Torricelli-ligningen:

Hvis du er mer interessert i emnet, kan du lese teksten vår: Torricelli ligning.

Seogså: Finn ut hvorfor mennesket ikke har kommet tilbake til månen
løste øvelser
Spørsmål 1) En mobil beveger seg med en starthastighet på 20 m / s når den starter en bremseprosess, med en retardasjon på 2,5 m / s². Bestem tiden det tar for dette møbelet å reversere bevegelsesretningen.
a) 8,0 s
b) 50,0 s
c) 5,0 s
d) 10,0 s
e) 12,5 s
Mal: Bokstaven A
Vedtak:
For å løse denne øvelsen vil vi benytte oss av timens hastighetsfunksjon. I denne forstand kan vi si at mobilen vil invertere bevegelsesretningen i øyeblikket som følger den hastigheten blir null. Dermed vil vi finne tiden det tar for den endelige hastigheten til denne mobilen å være 0 m / s, vel vitende om at den opprinnelige hastigheten var 20 m / s:

I denne beregningen brukte vi det negative tegnet for akselerasjon på grunn av at mobilen hadde redusert hastigheten hvert sekund, noe som karakteriserer en forsinket bevegelse.
Spørsmål 2) En rover har sin timeforskyvningsfunksjon gitt av S = 5 + t². Sjekk alternativet som indikerer henholdsvis starthastigheten og akselerasjonen til denne roveren:
a) 5 m / s og 1 m / s²
b) 0 m / s og 2 m / s²
c) 1 m / s og 5 m / s²
d) 5 m / s og 2 m / s²
e) 3 m / s og 5 m / s²
Mal: Bokstav B
Vedtak:
Vi vet at timevaktfunksjonene følger formatet ax² + bx + c = 0, men vi vet også at koeffisient b tilsvarer starthastigheten til mobilen og at koeffisienten a tilsvarer halvparten av akselerasjonen. Dermed må vi: v0 = 0 og a = 2 m / s².
Spørsmål 3) I en graf av posisjon versus tid, ses kurven for å beskrive en parabel med konkaviteten vendt nedover. Merk av for riktig graf for denne grafen:
a) Det er en akselerert bevegelse.
b) Dette er grafen for en retrograd bevegelse.
c) Dette er grafen for en forsinket bevegelse.
d) Dette er en variabel akselerasjonsgraf.
e) Dette er en økende hastighetsgraf.
Mal: Bokstav C
Vedtak:
Når grafen over posisjon versus tid er i form av en parabel, vet vi at denne bevegelsen har konstant akselerasjon. Hva forteller oss om bevegelsen representert av grafen er tilbakestående eller akselererter lignelsenes konkavitet, som i dette tilfellet er med forsiden ned. Derfor representerer grafen det gjelder en forsinket bevegelse.
Av meg. Rafael Helerbrock
Kilde: Brasilskolen - https://brasilescola.uol.com.br/fisica/movimento-uniformemente-variado.htm