हे आंदोलनUNIFORM तब होता है जब फर्नीचर का एक टुकड़ा अंदर चला जाता है सीधी रेखा और साथ वेगलगातार। एकसमान गति में, मोबाइल यात्रा करता है खाली स्थानबराबरी में ब्रेकसमान समय का।
यह भी देखें: किनेमेटिक्स का परिचय
निम्नलिखित स्थिति की कल्पना करें: एक वाहन जो अंदर जाता है आंदोलनUNIFORM, की गति के साथ 20किमी/घंटा, में अपनी प्रारंभिक स्थिति से स्थानांतरित हो जाएगा 10किमी, के एक समय अवधि में 0,5एच (30 मिनिट)। 1 घंटे में, यह वही वाहन. में अपनी प्रारंभिक स्थिति से दूर चला गया होगा 20किमी.
आल थे आंदोलनोंवर्दीजरूरहोने के लियेमेंलाइनसीधे, चूंकि इस प्रकार के आंदोलन में वहां नहीं हैं त्वरण. समझें: फर्नीचर के एक टुकड़े के लिए अपनी यात्रा की दिशा में परिवर्तन करने के लिए, यह आवश्यक है कि a शक्ति a. को प्रिंट करके उस पर कार्य करें त्वरण और मोबाइल को एक नया वेग घटक प्राप्त करना।
अब मत रोको... विज्ञापन के बाद और भी बहुत कुछ है;)
यूनिफ़ॉर्म मोशन फॉर्मूला
एकसमान गति का वर्णन करने के लिए उपयोग किए जाने वाले कुछ फ़ार्मुलों की जाँच करें और इसके प्रत्येक चर का अर्थ समझें:

एस - फर्नीचर की अंतिम स्थिति
रों0 — मोबाइल घर की स्थिति
वी — मोबाइल स्पीड
तो - समय अंतराल

वी - औसत गति
रों — विस्थापन
तो - समय अंतराल
आंदोलन के संदर्भ और वर्गीकरण
शरीर की गति को सही ढंग से परिभाषित करने के लिए, एक संदर्भ फ्रेम चुनना आवश्यक है। भौतिकी में, हम समझते हैं कि संदर्भात्मक वह स्थिति है जिसमें पर्यवेक्षक स्वयं को पाता है। नीचे दिया गया चित्र कुछ वाहनों को क्षैतिज दिशा में अलग-अलग दिशाओं में चलते हुए दिखाता है।
चित्र में अपनाया गया संदर्भ का फ्रेम (बिंदु 0 द्वारा चिह्नित) वह जगह है जहां पर्यवेक्षक है। इस संदर्भ के अनुसार, बाईं ओर की कारें, में हैं पदोंनकारात्मक, जबकि कारें, दाईं ओर, अंदर हैं पदोंसकारात्मक।

रेफरेंशियल आंदोलनों की दिशा को इंगित करता है।
यह महसूस करना महत्वपूर्ण है कि एक और संदर्भ चुनने का अर्थ प्रत्येक वाहन की प्रारंभिक स्थिति और उनके आंदोलनों के वर्गीकरण को भी बदलना होगा. नीचे दिया गया आंकड़ा दिखाता है कि चुना हुआ ढांचा क्या मानता है: इसके लिए, नारंगी कार और चांदी की कार, बाईं ओर, दूर चली जाती है, जबकि चांदी की कार, दाईं ओर, उसके पास आती है।.
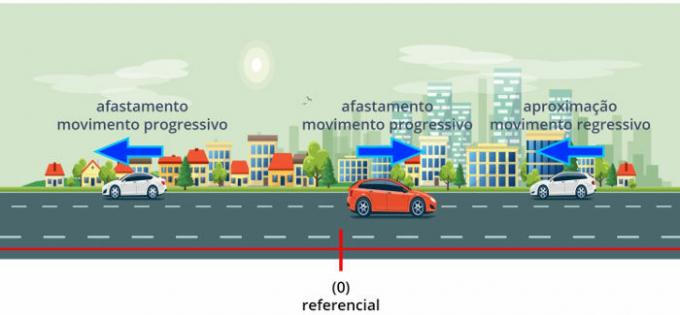
हम कहते हैं कि जब फर्नीचर का एक टुकड़ा अपने संदर्भ फ्रेम के पास पहुंचता है, तो उसकी गति होती है प्रतिगामी. यदि मोबाइल अपने संदर्भ से दूर चला जाता है, तो उसकी गति होती है प्रगतिशील. इसके अलावा, हम इसका श्रेय देते हैं आंदोलनप्रगतिशील हे संकेतसकारात्मक गति के लिए। के लिये प्रतिगामी आंदोलन, हम उपयोग करते हैं संकेतनकारात्मक, यह दर्शाता है कि मोबाइल और उसके रेफरेंस के बीच की दूरी कम हो जाती है समय के साथ।
प्रगतिशील और प्रतिगामी गति वीडियो क्लास
औसत गति
एक रोवर की औसत गति उस समय अंतराल में विस्थापन अनुपात (ΔS) द्वारा दी जाती है जिसमें गति हुई थी। विस्थापन (ΔS), बदले में, के बीच के अंतर से दिया जाता है पदोंअंतिम तथा प्रारंभिक फर्नीचर की।

वी - औसत गति
रों — विस्थापन
तो - समय अंतराल
औसत गति के सूत्र में, हम S of. कहते हैं विस्थापन। फर्नीचर के एक टुकड़े के विस्थापन की गणना आसानी से की जा सकती है यदि हम जानते हैं कि यह कहाँ से आया है (S0 — प्रारंभिक स्थिति) और वह कहाँ पहुँचा (S .)एफ -अंत स्थिति) आंदोलन के अंत में, जिसे ए. द्वारा सीमांकित किया जाता है टूटनामेंसमय (Δt), के बीच के समय के अंतर से गणना की जाती है क्षणोंअंतिम तथा प्रारंभिक (Δt = टीएफ - टी0). इस सूत्र को और अधिक विस्तार से, नीचे देखें:

गति माप इकाइयाँ
गति के माप की इकाई, के अनुसार अंतर्राष्ट्रीय प्रणाली (एसआई), और यह भूमिगत मार्गप्रतिदूसरा (एमएस)। हालाँकि, अन्य सामान्य इकाइयाँ हैं, जैसे कि किलोमीटरप्रतिइस घंटे (किमी/घंटा)। मीटर प्रति सेकंड को किलोमीटर प्रति घंटे में बदलना आसान है। इसे करने के लिए, बस गुणा या विभाजनकारक 3.6 factor द्वारा गति मापांक, जैसा कि निम्नलिखित आकृति में दिखाया गया है:

उदाहरण:
72 किमी/घंटा / 3,6 = 20 एमएस
108 किमी/घंटा /3,6 = 30 एमएस
माइंड मैप: यूनिफ़ॉर्म मूवमेंट
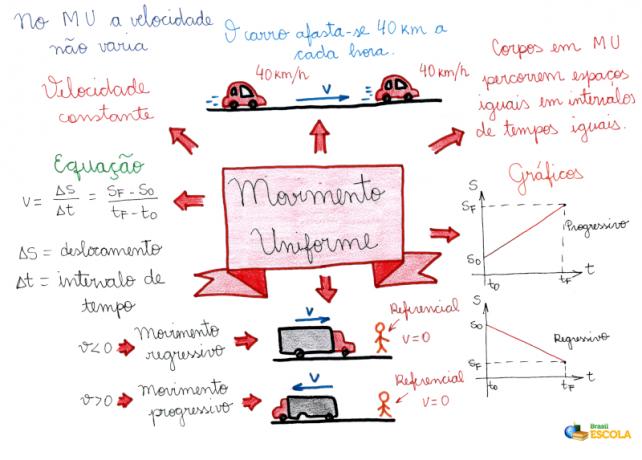
*मानसिक मानचित्र को PDF में डाउनलोड करने के लिए, यहाँ क्लिक करें!
यूनिफ़ॉर्म मोशन ग्राफिक्स
हम संबंधित कर सकते हैं समय के एक समारोह के रूप में फर्नीचर के एक टुकड़े की स्थिति ग्राफिक्स का उपयोग करना। सुचारू गति के लिए, स्थिति बनाम समय के ग्राफ नीचे की ओर झुकी हुई सीधी रेखाएँ बनाते हैं यूपी या करने के लिए कम, आंदोलन से संबंधित प्रगतिशील तथा प्रतिगामी, क्रमशः। स्थिति बनाम समय का उदाहरण ग्राफ़ देखें आंदोलनUNIFORMप्रगतिशील:
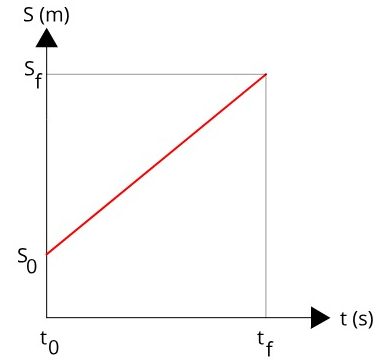
नज़रयह भी:बल और आंदोलन
नीचे दिए गए चित्र में, हमारे पास एक ग्राफ है जो एक मोबाइल के लिए समय के एक फलन के रूप में स्थिति का प्रतिनिधित्व करता है जो a. करता है आंदोलनUNIFORM तथा प्रतिगामी (या प्रतिगामी)।
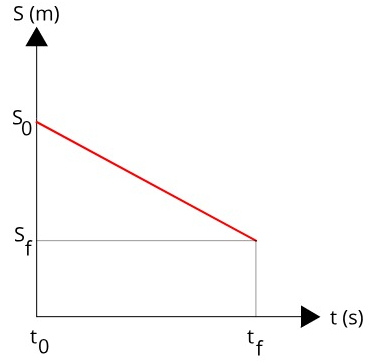
स्थिति बनाम समय रेखांकन का उपयोग यह निर्धारित करने के लिए किया जा सकता है वेग आंदोलन का। इसके लिए, यह ध्यान देने योग्य है कि मोबाइल की गति उसके स्पर्शरेखा द्वारा दी गई है, अर्थात के बीच का अनुपात कॉलरसामने (ΔS) और आसन्न पैर सीधी रेखा (Δt) तक।
एकसमान गति के लिए वेग बनाम समय ग्राफ, बदले में, सीधे होते हैं। समानांतर मॉड्यूल के क्षैतिज अक्ष के लिए नकारात्मक या सकारात्मक, आपके वर्गीकरण के अनुसार (प्रगतिशील या प्रतिगामी)। वेग ग्राफ के माध्यम से, रोवर के विस्थापन की गणना करना संभव है, ऐसा करने के लिए, हम बस रेखा के नीचे के क्षेत्र का मापांक निर्धारित करते हैं:
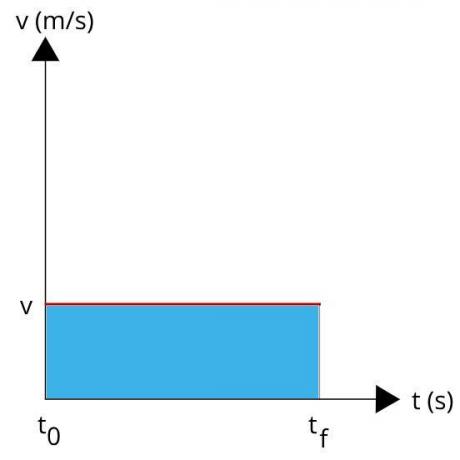
पिछले ग्राफ में, नीले रंग से रंगा गया क्षेत्र संख्यात्मक रूप से a. के क्षेत्रफल के बराबर है आयतइस क्षेत्र की गणना निम्न सूत्र का उपयोग करके की जा सकती है:

- क्षेत्र
ख — आधार का किनारा
एच - ऊंचाई
नज़रभी: यूनिफ़ॉर्म मोशन ग्राफिक्स
समान रूप से विविध आंदोलन
हे आंदोलनके बराबरविविध यह एक ऐसी गति है जिसकी गति समय के साथ लगातार बढ़ती या घटती जाती है। इस प्रकार की गति आवश्यक रूप से सीधी नहीं होती है और यह a के अधीन होती है त्वरण लगातार। यदि आप एमयूवी के बारे में अधिक जानना चाहते हैं, तो क्लिक करें यहाँ पर.
नज़रभी: किनेमेटिक्स अभ्यास कैसे हल करें?
वर्दी आंदोलन पर व्यायाम
1) एक मोबाइल प्रारंभिक स्थिति S. से शुरू होता है0 = - 15 मीटर और 12 सेकंड के बाद यह स्थिति S. पर हैएफ = 45 मी.
a) इस रोवर की औसत गति ज्ञात कीजिए।
बी) रोवर की स्थिति के प्रति घंटा कार्य का निर्धारण करें।
ग) t = 0 s, t = 1 s, t = 2 s, t = 3 s और t = 4 s के लिए मोबाइल स्थिति की गणना करें। फिर उस चाल के लिए स्थिति बनाम समय ग्राफ बनाएं।
डी) फर्नीचर के इस टुकड़े द्वारा वर्णित आंदोलन को रेट करें।
संकल्प
द) इस गति की औसत गति की गणना करने के लिए, हम औसत गति सूत्र का उपयोग करेंगे:

अभ्यास विवरण द्वारा प्रदान किए गए डेटा को सम्मिलित करते हुए, हम निम्नलिखित गणना करेंगे:
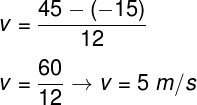
परिणाम बताता है कि मोबाइल चलता है 5 मीटर प्रति सेकंड.
बी) इस आंदोलन के प्रति घंटा कार्य को निर्धारित करने के लिए, हमें इसकी प्रारंभिक स्थिति और गति की पहचान करने की आवश्यकता है। फिर हम इन मानों को स्थिति के प्रति घंटा कार्य में प्रतिस्थापित करते हैं:

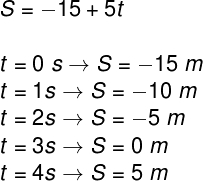
व्यायाम डेटा को बदलकर, हमारे पास निम्नलिखित स्थिति घंटे का कार्य होगा:

सी) आइए इसके प्रति घंटा स्थिति फ़ंक्शन का उपयोग करके, उल्लिखित प्रत्येक समय के लिए रोवर की स्थिति की गणना करें:
इस आंदोलन का ग्राफ नीचे दिखाया गया है:
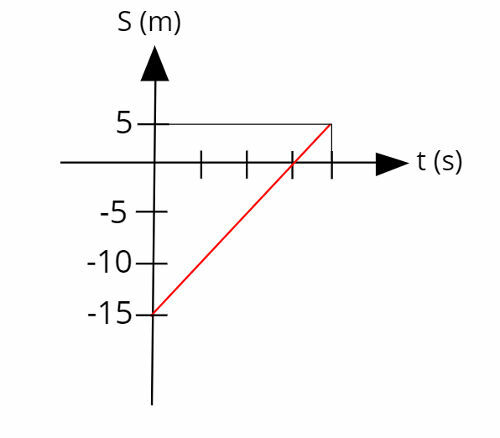
घ) ग्राफ का विश्लेषण करने पर यह देखा जा सकता है कि मोबाइल इंस्टेंट t = 0 s और t = 3 s के बीच रेफरेंशियल के करीब पहुंचता है, 3 s के बाद से मोबाइल दूर जाने लगता है। इसलिए, आंदोलन 0 और 3 s के बीच प्रतिगामी है और प्रगतिशील 3 s आगे है।
मेरे द्वारा राफेल हेलरब्रॉक