
Lahenda süsteemidlineaarne see on väga korduv ülesanne loodusteaduste ja matemaatika õppes. Tundmatute väärtuste otsimine viis lineaarsete süsteemide lahendamise meetodite väljatöötamiseni, näiteks liitmis-, võrdsus- ja asendusmeetod süsteemide jaoks, millel on kaks võrrandit ja kaks tundmatutja Crammeri reegel ja skaleerimine, mis lahendavad kahe võrrandi lineaarsed süsteemid, kuid mis on mugavamad enamate võrranditega süsteemide jaoks. Lineaarne süsteem on kahe või enama võrrandi kogum koos ühe või mitme tundmatuga.
Loe ka:Milline on seos maatriksite ja lineaarsete süsteemide vahel?
lineaarvõrrand
Töö võrranditega on olemas tänu vajadus leida tundmatud tundmatud väärtused. Nimetame seda võrrandiks, kui meil on võrdse algebraline avaldis ja see klassifitseeritakse lineaarseks, kui selle tundmatute suurim eksponent on 1, nagu on näidatud järgmistes näidetes:
2x + y = 7 → lineaarvõrrand kahe tundmatuga
a + 4 = -3 → lineaarvõrrand ühe tundmatuga
Üldiselt võib lineaarvõrrandit kirjeldada järgmiselt:
The1x1 +2x2 + a3x3... + aeixei = c
Võrrandisüsteemina teame, kui lineaarvõrrandit on rohkem kui üks. Alustame kahe tundmatu lineaarsete süsteemidega.
Ärge lõpetage kohe... Pärast reklaami on veel rohkem;)
Lineaarsete süsteemide lahendamine
Lineaarsed süsteemid, millel on kaks 1. astme võrrandit ja kaks tundmatut
Kahest võrrandist ja kahest tundmatust koosneva süsteemi lahendamiseks on mitu meetodid, kolm tuntumat on:
- võrdlusmeetod
- liitmismeetod
- asendusmeetod
Igaüks neist kolmest suudab lahendada kahe võrrandi ja kahe tundmatu lineaarse süsteemi. Need meetodid pole nii tõhusad süsteemide jaoks, kus on rohkem võrrandeid, kuna nende lahendamiseks on ka muid konkreetseid meetodeid.
Asendusmeetod
Asendusmeetod koosneb isoleerida üks tundmatu ühes võrrandis ja sooritage asendus teises võrrandis.
Näide:
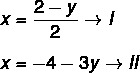
1. samm: isoleerida üks tundmatu.
Nimetame I esimeseks võrrandiks ja II teiseks võrrandiks. Neid kahte analüüsides lähme vali tundmatu, mida on kõige lihtsam isoleerida. Pange tähele, et võrrand I → x + 2y = 5, x-l pole koefitsienti, mis muudab eraldamise lihtsamaks, nii et me kirjutame võrrandi, mis mulle meeldib, ümber:
I → x + 2y = 5
I → x = 5 - 2a
2. samm: asendage I II-s.
Nüüd, kui meil on võrrand I ainult x-ga, võime võrrandis II asendada x väärtusega 5 - 2y.
II → 3x - 5y = 4
X asendamine 5–2a-ga:
3 (5 - 2 a) - 5 a = 4
Nüüd, kui võrrandil on ainult üks tundmatu, on see võimalik lahendada y väärtuse leidmiseks.

Teades y väärtust, leiame x väärtuse, asendades võrrandi I y väärtuse.
I → x = 5 - 2a
x = 5 - 2 · 1
x = 5 - 2
x = 3
Seega on süsteemi lahendus S = {3,1}.
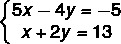
Võrdlusmeetod
Võrdlusmeetod koosneb eraldage tundmatu kahest võrrandist ja võrdsustage need väärtused.
Näide:

1. samm: las ma olen esimene võrrand ja II teine, eraldame ühe tundmatu I ja II. Tundmatu x isoleerimise valimisel peame:
2. samm: võrdsustada kaks uut võrrandit, kuna x = x.
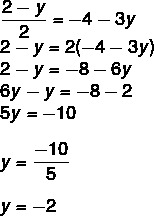
3. samm: asendada ühes võrrandis y väärtus -2-ga.
x = -4 - 3a
x = -4 - 3 (-2)
x = -4 + 6
x = 2
Nii et selle süsteemi lahendus on hulk S = {2, -2}.
Vaadake ka: Mis on funktsiooni ja võrrandi erinevused?
liitmismeetod
Liitmismeetod seisneb ühe võrrandi kõigi terminite korrutamises nii, et kui lisades võrrandile I võrrandi II, on üks selle tundmatutest võrdne nulliga.
Näide:
1. samm: korrutage üks võrranditest nii, et koefitsiendid oleksid vastupidised.
Pange tähele, et kui korrutame võrrandi II 2-ga, on meil võrrandis II 4y ja valemis I -4y ning et liidame I + II, meil on 0y, nii et korrutame kõik võrrandi II mõisted 2-ga, nii et see juhtuma.
I → 5x - 4y = -5
2 · II → 2x + 4y = 26
2. samm: sooritage summa I + 2 · II.
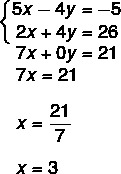
3. samm: asendage x = 3 väärtus üheks võrrandiks.

Kolme 1. astme võrrandi ja kolme tundmatuga sirgjoonelised süsteemid
Kui süsteemil on kolm tundmatut, võtame kasutusele muud lahendamismeetodid. Kõik need meetodid seostavad koefitsiente maatriksitega ja enim kasutatud meetodid on Crammeri reegel või skaleerimine. Mõlemas meetodis eraldusvõime jaoks on vajalik süsteemi maatriksesitus, isegi 2x2 süsteemi saab kujutada maatriksi abil. Esitamiseks on kaks võimalust, täielik maatriks ja mittetäielik maatriks:
Näide:
Süsteem
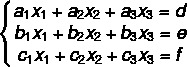
Saab esindada täielik maatriks

Ja selleks mittetäielik maatriks

Crammeri reegel
3x3 süsteemile lahenduste leidmiseks tundmatute x, y ja z korral kasutage nuppu Crammeri reegel, on vaja arvutada mittetäieliku maatriksi ja selle variatsioonide determinant. Seega peame:
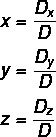
D → süsteemi mittetäieliku maatriksi determinant.
Dx → süsteemi mittetäieliku maatriksi determinant, asendades x veeru sõltumatute terminite veeruga.
Dy → süsteemi mittetäieliku maatriksi determinant, asendades y veeru sõltumatute terminite veeruga.
Dz → süsteemi mittetäieliku maatriksi determinant, asendades veeru z sõltumatute terminite veeruga.
Nii et teie tundmatute väärtuste leidmiseks peame kõigepealt arvutama määrav D, Dx, Dy süsteemiga seotud.
Näide:
1. samm: arvuta D.

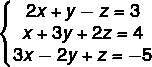
2. samm: arvuta Dx.
3. samm: siis võime leida x väärtuse, sest:

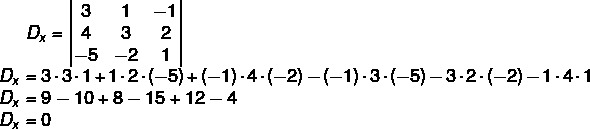
4. samm: arvuta Dy.
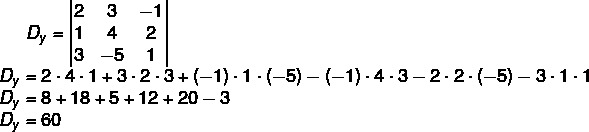
5. samm: siis saame arvutada y väärtuse:
6. samm: nüüd, kui me teame x ja y väärtusi, võime mõlemas reas leida väärtuse z, asendades x ja y väärtused ja eraldades z. Teine võimalus on arvutada Dz.
X = 0 ja y = 2 asendamine esimeses võrrandis:
2x + y - z = 3
2 · 0 + 2 - z = 3
0 + 2 - z = 3
-z = 3 - 2
-z = -1 (-1)
z = -1
Seetõttu on süsteemilahendus pakkumine (0,2, -1).
Juurdepääs ka: Ülesannete lahendamine võrrandisüsteemide abil
skaleerimine
Teine meetod lineaarsete süsteemide lahendamiseks on skaleerimine, kus nende tundmatute eraldamiseks kasutame ainult täielikku maatriksit ja joonte vahelisi toiminguid. Laiendame süsteemi allpool.
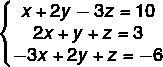
1. samm: kirjutage kogu süsteemi esindav maatriks.

olema L1, L2 ja L3 vastavalt maatriksi joontele 1, 2 ja 3, teostame operatsioone L vahel1 ja L2 ja L1 ja L3, nii et tulemus muudab teise ja kolmanda rea esimeses veerus olevad tingimused võrdseks nulliga.
Analüüsides maatriksi teist rida, asendame selle termini a21 nullimiseks tulemusega L2 → -2 · L1 + L2.
The21 = -2 · 1 + 2 = 0
The22 = -2 · 2 + 1 = -3
The23 = -2 · (-3) + 1 = 7
The24 =-2 · 10 + 3 = -17
Nii et L2 saab 0-3 7-17.
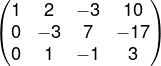
Analüüsides maatriksi kolmandat rida, asendame selle tulemusega L3 → 3L1 + L2, termini lähtestamiseks31.
The31 = 3 · 1 – 3 = 0
The32 = 3 · 2 + 2 = 8
The33 = 3 · (-3) +1 = -8
The34 = 3 · 10 – 6 = 24
Nii et L3 saab 0 8 -8 24.
Pange tähele, et kõik on jagatavad 8-ga, nii et L-joon3 olgu see lihtne, jagame selle 8-ga.
L3 → L3 : 8 on: 0 1-1 3.
Seega saab skaleeritud võrrandi uus maatriks:
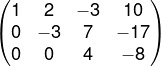
Nüüd on eesmärgiks lähtestada veerg y kolmandas reas, teostame toiminguid L vahel2 ja L3, eesmärgiga lähtestada ühe neist teine veerg.
Asendame L3 tähega L3 → L2 + 3L3.
The31 = 0 + 3 · 0 = 0
The32 = -3 + 3 · 1 = 0
The33 = 7 + 3 · (-1) = 4
The34 = -17 + 3 · 3 = -8
Nii et L3 on: 0 0 4 -8.
Uus maandatud maatriks on:
Nüüd, kui esindame seda maatriksit uuesti süsteemina, lisades veergudele x, y ja z, leiame järgmise:
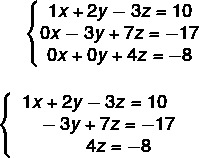
Seejärel võime leida iga tundmatu väärtuse. Analüüsides võrrandit III, peame:

Kui z = -2, asendame z väärtuse teise võrrandiga:
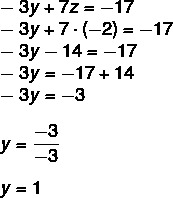
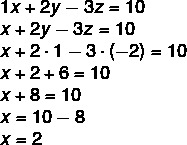
Lõpuks asendame esimeses võrrandis y ja z väärtused, et leida x väärtus.
Vaadake ka: 1. astme ebavõrdsussüsteem - kuidas seda lahendada?
lineaarne süsteemi klassifikatsioon
Lineaarne süsteem on lineaarvõrrandite kogum, millel võib olla mitu tundmatut ja mitu võrrandit. Selle lahendamiseks on mitu meetodit, olenemata võrrandite arvust. seal on kolm hinnangud lineaarse süsteemi jaoks.
- Määratud võimalik süsteem (SPD): kui teil on üks lahendus.
- Määramata võimalik süsteem (SPI): kui sellel on lõpmatuid lahendusi.
- võimatu süsteem(SI): kui lahendust pole.
lahendatud harjutused
küsimus 1 (IFG 2019) Vaatleme aluse mõõtmete ja kõrguse võrdlust kolmnurga alusega 168 cm ja erinevuse 24 cm. On õige öelda, et aluse ja kõrguse mõõtmised selle baasmõõdu suhtes vastavalt:
a) 72 cm ja 96 cm
b) 144 cm ja 24 cm
c) 96 cm ja 72 cm
d) 24 cm ja 144 cm
Resolutsioon
Alternatiiv C.
Olgu h → kõrgus ja b → alus, siis on meil järgmine süsteem:

Lisamismeetodi järgi peame:

H väärtuse leidmiseks asendame esimese võrrandiga b = 96 cm:
b + h = 168
96 + h = 168
h = 168 - 96
h = 72 cm
2. küsimus Järgmist lineaarset süsteemi esindav mittetäielik maatriks on:

Resolutsioon
Alternatiiv C.
Mittetäielik maatriks on koefitsientidega x, y ja z, seega saab sellest 3x3 maatriks. Alternatiive analüüsides on täht C see, mis sisaldab õigete märkidega 3x3 maatriksit.
Autor Raul Rodrigues de Oliveira
Matemaatikaõpetaja


