
Öva på linjens ekvationer med de lösta och kommenterade övningarna, rensa bort dina tvivel och var redo för utvärderingar och inträdesprov.
Linjeekvationer tillhör det område av matematik som kallas analytisk geometri. Detta studieområde beskriver punkter, linjer och former i planet och i rymden, genom ekvationer och samband.
Lutningen på linjen som går genom punkterna A (0,2) och B (2,0) är
a) -2
b) -1
c) 0
d) 2
e) 3
Beräkna värdet på t, med vetskap om att punkterna A (0, 1), B (3, t) och C (2, 1) är kolinjära.
till 1
b) 2
c) 3
d) 4
e) 5
Trepunktsjusteringsvillkoret säger att matrisens determinant är lika med noll.
Enligt Sarrus regel:
0.t.1 + 1.1.2 + 1.3.1 - (2.t.1 + 1.1.0 + 1.3.1) = 0
0 + 2 + 3 - (2t + 0 + 3) = 0
5 - 2t - 3 = 0
2 = 2t
t = 1
Koefficienterna, vinkel och linjär, för linjen x - y + 2 = 0 är resp.
a) Vinkelkoefficient = 2 och linjär koefficient = 2
b) Vinkelkoefficient = -1 och linjär koefficient = 2
c) Vinkelkoefficient = -1 och linjär koefficient = -2
d) Vinkelkoefficient = 1 och linjär koefficient = 2
e) Vinkelkoefficient = 2 och linjär koefficient = 2
När vi skriver ekvationen i reducerad form har vi:
Lutningen är talet som multiplicerar x, så det är 1.
Den linjära koefficienten är den oberoende termen, så den är 2.
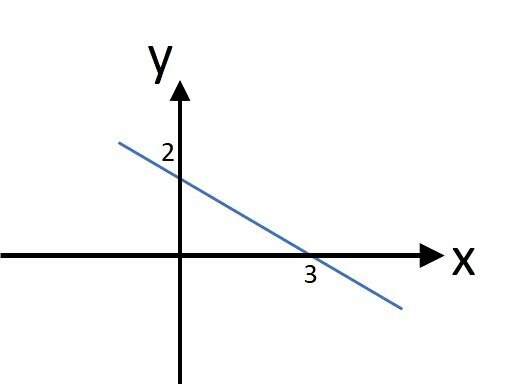
Få ekvationen för linjen som har grafen nedan.
a) x + y - 6 = 0
b) 3x + 2y - 3 = 0
c) 2x + 3y - 2 = 0
d) x + y - 3 = 0
e) 2x + 3y - 6 = 0
Punkterna där linjen skär axlarna är (0, 2) och (3, 0).
Använd den parametriska formen:
Eftersom svarsalternativen är i allmän form måste vi utföra summan.
Beräkna den minsta gemensamma multipeln för att vara lika med nämnarna.
MMC(3, 2) = 6
Hitta koordinaterna för skärningspunkten mellan linjen r: x + y - 3 = 0 och linjen som går genom punkterna A(2, 3) och B(1, 2).
a) (3, 2)
b) (2, 2)
c) (1, 3)
d) (2, 1)
e) (3, 1)
Bestäm linjen som går genom punkterna A och B.
Beräkning av vinkelkoefficienten:
Så raden är:
Skärningspunkten är lösningen av systemet:
Lägga till ekvationerna:
Ersätter i den första ekvationen:
Så koordinaterna för punkten där linjerna skär är (2, 1)
(PUC - RS) Den räta linjen r i ekvationen y = ax + b går genom punkten (0, –1), och för varje variationsenhet av x finns det en variation i y, i samma riktning, av 7 enheter. Din ekvation är
a) y = 7x – 1.
b) y = 7x + 1.
c) y = x – 7.
d) y = x + 7.
e) y = –7x – 1.
En förändring av 1 i x orsakar en förändring på 7 i y. Detta är definitionen av lutning. Därför måste ekvationen ha formen:
y = 7x + b
Eftersom punkten (0, -1) tillhör linjen, kan vi ersätta den i ekvationen.
På detta sätt är ekvationen:
(IF-RS 2017) Ekvationen för linjen som går genom punkterna A(0,2) och B(2, -2) är
a) y = 2x + 2
b) y = -2x -2
c) y = x
d) y = -x+2
e) y = -2x + 2
Med hjälp av den reducerade ekvationen och koordinaterna för punkt A:
Genom att använda koordinaterna för punkt B och ersätta värdet på b = 2:
Att ställa upp ekvationen:
(UNEMAT 2017) Låt r vara en rät linje med ekvation r: 3x + 2y = 20. En linje s skär den i punkten (2,7). Vet du att r och s är vinkelräta mot varandra, vad är ekvationen för linjen s?
a) 2x − 3y = −17
b) 2x − 3y = −10
c) 3x + 2y = 17
d) 2x − 3y = 10
e) 2x + 3y = 10
Eftersom linjerna är vinkelräta är deras sluttningar:
För att bestämma lutningen på r ändrar vi ekvationen från generell till reducerad form.
Lutningen är talet som multiplicerar x, och är -3/2.
Hitta koefficienten för linjen s:
När linjerna skär varandra i punkten (2, 7), ersätter vi dessa värden i ekvationen för linjen s.
Att ställa in den reducerade ekvationen för linjen s:
Eftersom svarsvalen är i allmän form måste vi konvertera.
(Enem 2011) En visuell programmerare vill modifiera en bild, öka dess längd och behålla dess bredd. Figurerna 1 och 2 representerar originalbilden respektive den som transformerats genom att dubbla längden.
För att modellera alla transformationsmöjligheter i längden på denna bild måste programmeraren upptäcka mönster av alla linjer som innehåller segmenten som konturerar ögon, näsa och mun och sedan utvecklar program.
I det föregående exemplet blev segmentet A1B1 i figur 1, som finns i linje r1, segmentet A2B2 i figur 2, som ingår i linje r2.
Antag att, om bildens bredd hålls konstant, multipliceras dess längd med n, där n är ett heltal och ett positivt tal, och att linjen r1 på detta sätt genomgår samma transformationer. Under dessa förhållanden kommer segmentet AnBn att finnas på raden rn.
Den algebraiska ekvationen som beskriver rn, i det kartesiska planet, är
a) x + ny = 3n.
b) x - ny = - n.
c) x - ny = 3n.
d) nx + ny = 3n.
e) nx + 2ny = 6n.
Hitta linjen r1 i den ursprungliga figuren:
Dess vinkelkoefficient är:
Linjen skär y-axeln vid punkten (0, 3), så dess ekvation är:
Hitta linjen r2 i den modifierade figuren:
Dess vinkelkoefficient är:
Linjen skär också y-axeln vid punkten (0, 3), så dess ekvation är:
Från den ursprungliga figurekvationen till den modifierade multiplicerades koefficienten för y och den oberoende termen med 2.
Så, för andra proportioner:
