
Rörelsejämntdiverse (MUV) är en rörelse där hastighetsförändringen kallas acceleration, sker med konstant hastighet. Den enhetligt varierade rörelsen är en särskilt fall avrörelsediverse. I den här varierar hastigheten bara, medan den här hastigheten varierarisättkonstant, det vill säga dess storlek genomgår lika stora ökningar eller minskningar varje sekund.
Seockså: Allt du behöver veta om Newtons lagar
Introduktion till enhetligt varierad rörelse
När en möbel utvecklar en enhetligt varierad rörelse, dess hastighet öka eller minskar stadigt, varje sekund. När denna hastighet ökar säger vi att dess rörelse är accelererad; när det minskar säger vi att dess rörelse är fördröjd.
Den jämnt varierade rörelsen kan beskrivas med hjälp av timfunktioner, liknande de som används för enhetlig rörelse, eftersom de är mer allmänna För att lösa några övningar relaterade till denna typ av rörelse är det också nödvändigt att förstå innebörden bakom grafiken placera och hastighet. Därför ska vi studera de olika MUV-tidsfunktionerna samt deras respektive grafiska representationer.
Sluta inte nu... Det finns mer efter reklam;)
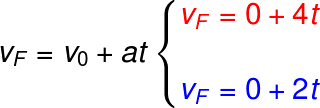
Först tar vi hand om hastighetsfunktionen per timme, som också kan skrivas i form av formeln som används för att beräkna den genomsnittliga accelerationen, se:

vF och du0 - slut- och initialhastigheter (m / s)
De - acceleration (m / s)
t - tidsintervall (er)
Formeln visar att en rovers hastighet varierar linjärt med dess acceleration, det vill säga förutsatt att en kropp har en acceleration på 3 m / s², kommer dess hastighet att öka med 3 m / s vardera andra.
Om vi är uppmärksamma på formatet för positionens timfunktion ser vi att det är en första gradens funktion tycka om y = a + bx, känd som rak ekvation. När det gäller timhastighetsfunktionen kallas koefficienten a linjär koefficient, och den starthastighet av mobilen, medan koefficienten b, känd som vinkelkoefficient, och den acceleration av detta möbel.
I följande bild tar vi en hastighetsgraf som en funktion av tiden v (t), kontrollera:
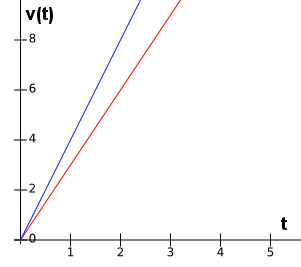
I diagrammet ser vi två linjer, en röd och en blå, som representerar rörelsen av två möbler. Dessa avgår hemifrån (v0 = 0) och börja accelerera stadigt. En sekund efter avgången är den blå roveren med en hastighet på 4 m / s, medan den röda roveren är vid 2 m / s. När man analyserar lutningen på de raka linjerna är det lätt att se att accelerationen för den blå roveren är större än den för den röda roveren.
Se också:Kolla in fantastiska fakta om solsystemet
Det är möjligt att se, baserat på grafläsningen, att mobilens hastighet i blått ökar med 4 m / s, varje sekund, medan hastigheten för mobil B ökar med endast 2 m / s, under samma intervall av tid. På detta sätt kan vi skriva timfunktionerna för de rörelser som representeras av de blå och röda linjerna, kontrollera:
Nedan visar vi vad formatet på diagrammet för a accelererade jämnt varierad rörelse och fördröjd i rött respektive blått. För båda kommer vi att anta en initial hastighet som inte är noll:
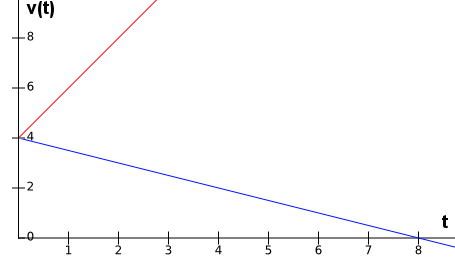
Observera att den försenade rörelsen, representerad av den blå linjen, vänder sin betydelse vid tidpunkten t = 8 s, eftersom dess hastighet börjar anta negativa värden.
Seockså: Lär dig att lösa övningar om enhetlig rörelse
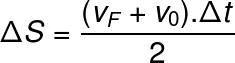
Förutom att få mobilacceleration, baserat på hastighetsdiagrammen, är det också möjligt att beräkna avståndet med mobilen. För detta måste vi beräkna diagrammets yta under linjen. Detta område kan lätt hittas med tanke på trapetsområde och kan erhållas direkt med följande formel, särskilt användbart när mobilacceleration inte är känd:
Förutom funktionen för timhastighet använder MUV positionstimefunktioner. Dessa är andra gradens funktioner, eftersom förskjutningen av en mobil i MUV är proportionell mot det kvadrerade tidsintervallet. Kontrollera nu position och förskjutningsekvationer för MUV:

sF - slutlig position
s0 - start position
v0 - initialhastighet
S - förskjutning
Sådana ekvationer liknar andra gradens funktioner av typen ax² + bx + c = 0. I dessa timfunktioner av position och förskjutning, O koefficientDeär lika med à a / 2 (acceleration dividerat med två), vilket multiplicerar termen t², medan hastighetförsta (v0) representerar koefficientB.
Baserat på detta kommer vi att visa dig hur den jämnt varierade rörelsegrafiken ser ut för de accelererade, i röda och fördröjda fall i blått, med utgångspunkt från en initialhastighet som inte är noll:

Analysera denna graf är det möjligt att se att, för den accelererade rörelsen, i rött, paravollens konkavitet är vänd uppåt eftersom dess acceleration är positiv, medan för försenad rörelse, i blått, paravollens konkavitet vänds nedåt, eftersom dess acceleration ger motsatt riktning till dess initialhastighet.
De timfunktioner som användes för att bilda graferna, representerade av de röda respektive blå kurvorna, liksom deras värden på placera, hastighetförsta och acceleration visas nedan:

Torricelli ekvation
DE Torricelli ekvation är mycket användbart när vi behöver lösa ett problem relaterat till rörelsejämntdiverse och vi vet inte vid vilket tidsintervall det inträffade. Denna ekvation kan enkelt erhållas baserat på timfunktionerna för position och hastighet.
Kolla in formeln för Torricelli-ekvationen:

Om du är mer intresserad av ämnet, läs vår text: Torricelli ekvation.

Seockså: Ta reda på varför människan inte har återvänt till månen
lösta övningar
Fråga 1) En mobil rör sig med en initialhastighet på 20 m / s när den startar en bromsningsprocess med en retardation på 2,5 m / s². Bestäm den tid som behövs för att denna möbel ska vända sin rörelseriktning.
a) 8,0 s
b) 50,0 s
c) 5,0 s
d) 10,0 s
e) 12,5 s
Respons: Bokstaven A
Upplösning:
För att lösa denna övning kommer vi att använda timhastighetsfunktionen. I denna mening kan vi säga att mobilen kommer att vända riktningen för sin rörelse i det ögonblick som följer den där dess hastighet blir noll. Således kommer vi att hitta den tid som krävs för den slutliga hastigheten för denna mobil att vara 0 m / s, med vetskap om att dess initialhastighet var 20 m / s:

I denna beräkning använde vi det negativa tecknet för acceleration på grund av det faktum att mobilens hastighet minskade varje sekund, vilket kännetecknar en försenad rörelse.
Fråga 2) En rover har sin timförskjutningsfunktion ges av S = 5 + t². Kontrollera alternativet som indikerar starthastigheten respektive accelerationen för denna rover:
a) 5 m / s och 1 m / s²
b) 0 m / s och 2 m / s²
c) 1 m / s och 5 m / s²
d) 5 m / s och 2 m / s²
e) 3 m / s och 5 m / s²
Respons: Bokstaven B
Upplösning:
Vi vet att timskiftfunktionerna följer formatet ax² + bx + c = 0, men vi vet också att koefficienten b är lika med mobilens initialhastighet och att koefficienten a är lika med hälften av dess acceleration. Således måste vi: v0 = 0 och a = 2 m / s².
Fråga 3) I en kurva över position kontra tid ses kurvan för att beskriva en parabel med dess konkavitet vänd nedåt. Markera rätt alternativ för den här grafen:
a) Det är en påskyndad rörelse.
b) Detta är grafen för en retrograd rörelse.
c) Detta är grafen för en fördröjd rörelse.
d) Detta är ett diagram med variabel acceleration.
e) Detta är ett stigande hastighetsdiagram.
Mall: Bokstaven C
Upplösning:
När grafen för position kontra tid är i form av en parabel, vet vi att denna rörelse har konstant acceleration. Vad säger oss om rörelsen som representeras av diagrammet är fördröjd eller accelereradär liknelsen i konkavitet, som i detta fall är vänd nedåt. Därför representerar grafen i fråga en försenad rörelse.
Av mig Rafael Helerbrock

