Wektor to reprezentacja, która określa wielkość, kierunek i kierunek wielkości wektorowej. Wektory to proste segmenty zorientowane strzałką na jednym końcu.
Nazywamy wektory literą i małą strzałką.
Wektory charakteryzują wielkości wektorowe, czyli wielkości wymagające orientacji, czyli kierunku i kierunku. Niektóre przykłady to: siła, prędkość, przyspieszenie i przemieszczenie. Wartość liczbowa nie wystarczy, konieczne jest opisanie, gdzie działają te wielkości.
moduł wektora
Moduł lub intensywność wektora to jego wartość liczbowa, po której następuje jednostka miary wielkości, którą reprezentuje, na przykład:
Wskazujemy moduł między słupkami trzymając strzałkę lub samą literę, bez słupków i bez strzałki.
Długość wektora jest proporcjonalna do modułu. Większy wektor reprezentuje większy moduł.
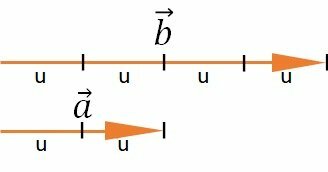
moduł wektorowy to 4 jednostki, podczas gdy wektor
to 2 jednostki.
Kierunek wektora
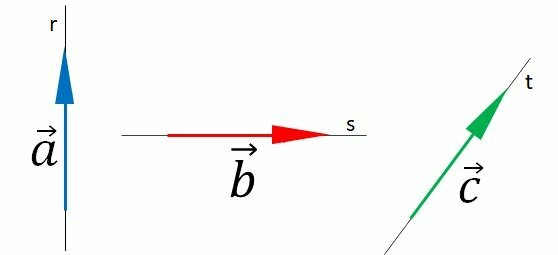
Kierunek wektora to nachylenie linii podporowej, na której jest wyznaczany. Dla każdego wektora istnieje tylko jeden kierunek.
poczucie wektora
Kierunek wektora pokazuje strzałka. Ten sam kierunek może zawierać dwa kierunki, na przykład w górę lub w dół oraz w lewo lub w prawo.
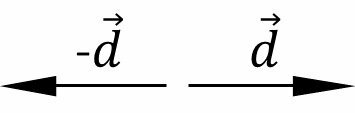
Przyjmując kierunek jako dodatni, kierunek przeciwny, ujemny, jest reprezentowany przez znak minus przed symbolem wektora.
Wynikowy wektor
Otrzymany wektor jest wynikiem operacji wektorowych i jest równoważny zbiorowi wektorów. Wygodnie jest znać wektor, który reprezentuje efekt wywołany przez więcej niż jeden wektor.
Na przykład na ciało może działać zestaw sił, a my chcemy wiedzieć, jaki rezultat wywołają one razem na tym ciele. Każda siła jest reprezentowana przez wektor, ale wynik może być reprezentowany tylko przez jeden wektor: wektor wynikowy.

Powstały wektor, , o kierunku poziomym i kierunku w prawo, jest wynikiem dodawania i odejmowania wektorów.
,
,
oraz
. Powstały wektor wykazuje tendencję ciała do poruszania się w tej orientacji.
Wektory o kierunku pionowym mają ten sam rozmiar, czyli ten sam moduł. Ponieważ mają przeciwne znaczenia, wzajemnie się znoszą. To pokazuje, że nie będzie ruchu skrzyni w kierunku pionowym.
Analizując wektory oraz
, które mają ten sam kierunek i przeciwne kierunki, zdajemy sobie sprawę, że część siły „pozostaje” po prawej stronie, jako wektor
jest większy niż
czyli moduł
jest większy.
Aby określić wynikowy wektor, wykonujemy operacje dodawania i odejmowania wektorów.
Dodawanie i odejmowanie wektorów o tym samym kierunku
Z równe zmysły, dodajemy moduły i zachowujemy kierunek i kierunek.
Przykład:
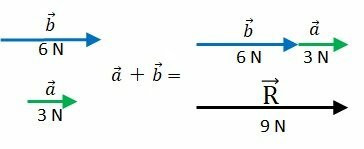
Graficznie umieszczamy wektory po kolei, bez zmiany ich modułów. Początek jednego musi pokrywać się z końcem drugiego.
Przemienność dodawania jest ważna, ponieważ kolejność nie zmienia wyniku.
Z przeciwne zmysły, odejmujemy moduły i zachowujemy kierunek. Kierunek wektora wynikowego jest kierunkiem wektora o największym module.
Przykład: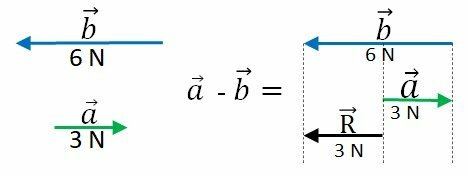
wektor to pozostała część
, po wycofaniu
.
Odjęcie jednego wektora jest równoznaczne z dodaniem przeciwnego do drugiego.
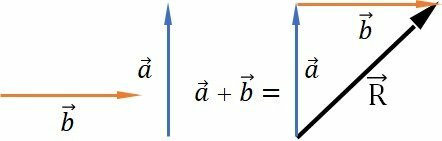
Dodawanie i odejmowanie wektorów prostopadłych
Aby dodać dwa wektory o kierunkach prostopadłych, przesuwamy wektory bez zmiany ich modułu, tak aby początek jednego pokrywał się z końcem drugiego.
Powstały wektor łączy początek pierwszego z końcem drugiego.
Aby określić wielkość wynikowego wektora między dwoma prostopadłymi wektorami, dopasowujemy początek dwóch wektorów.
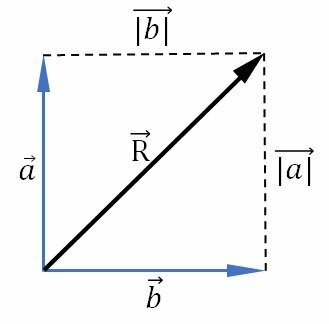
Moduł wynikowego wektora jest określony przez twierdzenie Pitagorasa.
Dodawanie i odejmowanie wektorów ukośnych
Dwa wektory są skośne, gdy tworzą kąt między ich kierunkami inny niż 0°, 90° i 180°. Aby dodać lub odjąć wektory ukośne, stosuje się metody równoległoboku i linii wielokątnej.
metoda równoległoboku
Aby wykonać metodę lub regułę równoległoboku między dwoma wektorami i narysować wynikowy wektor, wykonaj następujące kroki:
Pierwszym krokiem jest umieszczenie ich początków w tym samym punkcie i narysowanie linii równoległych do wektorów w celu utworzenia równoległoboku.
Drugi polega na narysowaniu ukośnego wektora na równoległoboku, między sumą wektorów a sumą równoległych linii.

Linie przerywane są równoległe do wektorów, a utworzona figura geometryczna jest równoległobokiem.
Otrzymany wektor to linia łącząca początek wektorów z równoleżnikami.
O moduł wynikowego wektora jest uzyskiwany przez prawo Cosinusa.
Gdzie:
R jest wielkością powstałego wektora;
a to moduł wektorowy ;
b jest modułem wektora ;
jest kątem utworzonym między kierunkami wektorów.
Metoda równoległoboku służy do dodawania pary wektorów. Jeśli chcesz dodać więcej niż dwa wektory, musisz dodać je dwa na dwa. Do wektora wynikającego z sumy pierwszych dwóch dodajemy trzeci i tak dalej.
Innym sposobem dodania więcej niż dwóch wektorów jest użycie metody linii wielokąta.
metoda linii wielokątnej
Metoda linii wielokątnych służy do znalezienia wektora powstałego w wyniku dodania wektorów. Ta metoda jest szczególnie przydatna podczas dodawania więcej niż dwóch wektorów, takich jak następujące wektory ,
,
oraz
.
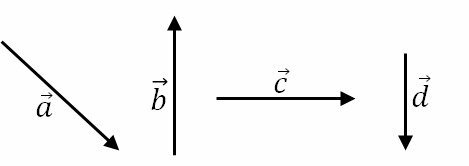
Aby skorzystać z tej metody, musimy uporządkować wektory tak, aby koniec jednego (strzałka) pokrywał się z początkiem drugiego. Ważne jest, aby zachować moduł, kierunek i kierunek.
Po ułożeniu wszystkich wektorów w postaci linii wielokątnej musimy prześledzić wektor wynikowy, który biegnie od początku pierwszego do końca ostatniego.
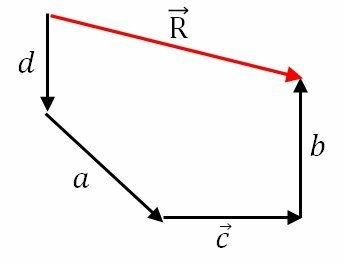
Ważne jest, aby powstały wektor zamykał wielokąt, a jego strzałka pokrywała się ze strzałką w ostatnim wektorze.
Własność przemienności jest ważna, ponieważ kolejność, w jakiej umieszczamy wektory wykresu, nie zmienia wektora wynikowego.
rozkład wektorowy
Rozkład wektora polega na zapisaniu składników, które składają się na ten wektor. Te składniki są innymi wektorami.
Każdy wektor można zapisać jako złożenie innych wektorów poprzez sumę wektorów. Innymi słowy, możemy napisać wektor jako sumę dwóch wektorów, które nazywamy składowymi.
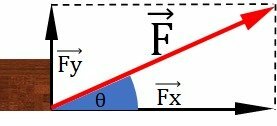
Używając kartezjańskiego układu współrzędnych, z prostopadłymi osiami x i y, określamy składowe wektora.
wektor jest wynikiem sumy wektorów między wektorami składowymi.
oraz
.
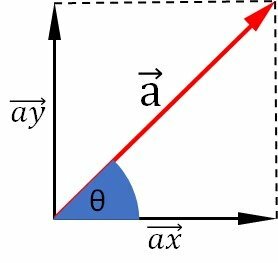
wektor nachylenie
tworzy trójkąt prostokątny z osią x. W ten sposób określamy moduły wektorów składowych za pomocą trygonometrii.
Moduł składowy topór.
Moduł składowy ay.
moduł wektorowy jest uzyskiwany z twierdzenia Pitagorasa.
Przykład
Siła jest wykonywana przez wyciągnięcie klocka z ziemi. Siła modułu 50 N jest nachylona o 30° od poziomu. Określ poziomą i pionową składową tej siły.
Dane:
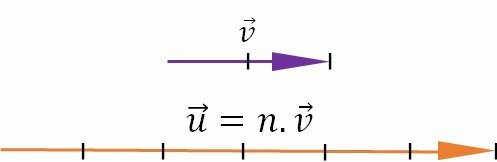
Mnożenie liczby rzeczywistej przez wektor
Mnożąc liczbę rzeczywistą przez wektor, otrzymamy nowy wektor o następujących cechach:
- Ten sam kierunek, jeśli liczba rzeczywista jest niezerowa;
- W tym samym kierunku, jeśli liczba rzeczywista jest dodatnia, aw przeciwnym kierunku, jeśli jest ujemna;
- Moduł będzie iloczynem modułu liczby rzeczywistej i modułu pomnożonego wektora.
Iloczyn między liczbą rzeczywistą a wektorem
Gdzie: jest wektorem wynikającym z mnożenia;
to liczba rzeczywista;
jest mnożonym wektorem.
Przykład
Niech liczba rzeczywista n = 3 i wektor modulo 2 iloczyn między nimi jest równy:
Obliczanie modułu
Kierunek i kierunek będą takie same.
Ćwiczenie 1
(Enem 2011) Siła tarcia to siła, która zależy od kontaktu między ciałami. Można ją zdefiniować jako siłę przeciwną do tendencji do przemieszczania się ciał i jest generowana z powodu nierówności pomiędzy dwiema stykającymi się powierzchniami. Na rysunku strzałki reprezentują siły działające na ciało, a powiększona kropka przedstawia nierówności istniejące między dwiema powierzchniami.

Na rysunku wektory reprezentujące siły powodujące przemieszczenie i tarcie to odpowiednio:
Ten) 
B) 
C) 
D) 
oraz) 
Prawidłowa odpowiedź: litera a) 
Strzałki reprezentują wektory sił działających w ruchu w kierunku poziomym, będąc parą akcja-reakcja, mają przeciwne kierunki.
Pionowe strzałki reprezentują działania Siły Ciężaru i Siły Normalnej, a ponieważ są one równe, znoszą się nawzajem bez ruchu w kierunku pionowym.
Ćwiczenie 2
(UEFS 2011) Diagram wektorowy na rysunku przedstawia siły wywierane przez dwie gumki na ząb osoby poddawanej leczeniu ortodontycznemu.
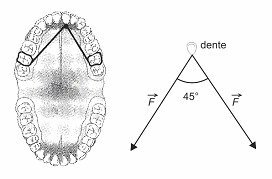
Zakładając, że F = 10,0N, sen45° = 0,7 i cos45° = 0,7, intensywność siły przyłożonej przez gumki do zęba w N jest równa
a) 3√10
b) 2√30
c) 2√85
d) 3√35
e) 2√45
Prawidłowa odpowiedź: c) 2√85
Intensywność siły przyłożonej do zęba jest wyznaczana przez prawo cosinusów.
a i b są równe 10 N.
Faktoryzacja pierwiastka kwadratowego daje nam:
Dlatego intensywność siły wypadkowej przyłożonej przez gumki na ząb wynosi .
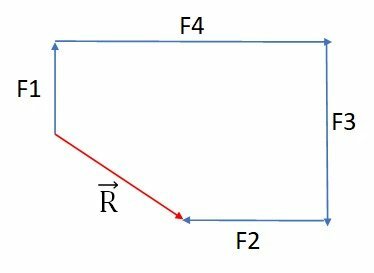
Ćwiczenie 3
(PUC RJ 2016) Siły F1, F2, F3 i F4 na rysunku tworzą do siebie kąty proste, a ich moduły to odpowiednio 1 N, 2 N, 3 N i 4 N.
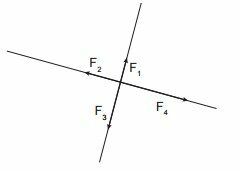
Oblicz moduł siły wypadkowej w N.
a) 0
b) √2
c) 2
d) 2√ 2
e) 10
Prawidłowa odpowiedź: d) 2√ 2
Używamy metody linii wielokątnych, aby określić wynikowy wektor. Aby to zrobić, zmieniamy wektory tak, aby koniec jednego pokrywał się z początkiem drugiego, w ten sposób:
Wykorzystując układ współrzędnych, którego początek znajduje się na początku wektora wynikowego, możemy określić moduły jego składowych w następujący sposób:
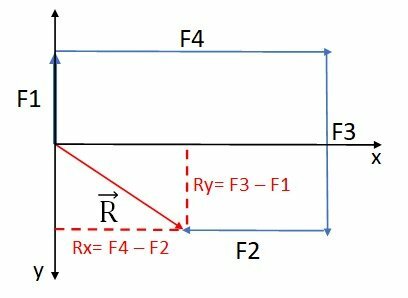
Dlatego musimy:
Ry = 3 - 1 = 2 N
Rx = 4 - 2 = 2 N
Wielkość otrzymanego wektora jest określona przez twierdzenie Pitagorasa.
Dlatego moduł siły wypadkowej jest równy .
dowiedz się więcej o
- Wektory: dodawanie, odejmowanie i dekompozycja.
- Ilości wektorowe
✖