トルク、または力のモーメントは、 強さ それが適用されるボディを回転させる必要があります。 トルクは ベクター垂直 ベクトルによって形成される平面に 強さ と レイの回転。 トルクベクトルは、力と距離の外積を使用して計算できます。
物体の回転軸からある程度の距離に力が加えられると、その物体は回転します。 このボディが回転していないか、一緒に回転している場合 一定の角速度、私たちは彼がいると言います 残高回転。 回転バランスは、 結果としてからトルク 体に作用するのは ヌル したがって、このボディは一定またはゼロの速度で回転します。 言い換えれば、 トルク結果として 体については ヌル、この体 いいえそれは提示します加速度角度。
O トルク として理解することができます エージェント動的 回転の。 このように、力は並進運動に対するものであるように、それは回転運動に対するものです。 ある点を中心に物体を回転させたい場合は、トルクをかける必要があります。
トルクユニット
によると、トルクユニット 国際単位系、 そしてその ニュートンタイムズ地下鉄 (N.m) 定義上、ボディが回転するとき 検出スケジュール、あなたのトルクは ネガティブ; それ以外の場合、それに適用されるトルクは モジュールポジティブ。 さらに、トルクベクトルの方向と方向は、 右手の法則. 次の図を確認してください。

トルクは、力(F)に向かって手を閉じることで決定できます。 それは親指の方向によって決定されます。
方式
トルク係数は、力、距離、およびこれら2つの量の間に形成される角度の正弦の積によって計算できます。
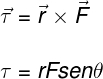
τ –トルク
NS -レイ
NS - 強さ
θ –rとFの間の角度
上記の式では、 θ は、回転半径(r)と力(F)の間に形成される角度です。 力が半径(r)に対して90°の角度で加えられる場合、角度の正弦は1に等しくなります。 半径(r)は、適用点から本体の回転軸までの距離によって決定され、レバーアームとも呼ばれます。 ボディのレバーアームが長いほど、回転しやすくなります。
トルクと角運動量
トルクは エージェント動的 回転の。 ある体にトルクを加えると、その体は得ることができます 速度角度のある、 回転運動について説明します。 体が回転しているとき、それは 時間角度。 角運動量は アナログ の回転 時間線形、 としても知られている 総額の動き、 したがって、角運動量は物体またはシステムの回転運動の量であることが理解できます。
結果として生じる物体のトルクが ヌル、 あなたの 時間角度 残っている 絶え間ないそうしないと、角運動量が変化します。
運動量の時間的変化として書くことができる力と同様に、トルクは時間に対する角運動量の変化として理解することができます。
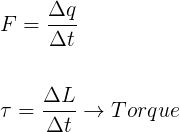
次に、角運動量は、体の位置とその運動量の外積によって計算できます。 回転体の角運動量係数は、次の要素によって決定されます。
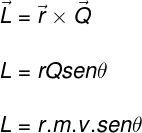
L –角運動量(kg.m²/ s)
NS –パス半径(m)
NS –移動量(kg.m / s)
θ –rとQの間の角度
トルクの例
ドアを開けると、回転軸から離れた位置に力がかかるため、より大きなトルクがかかります。
ギアバイクでペダリングするとき、クラウンの直径が大きいほど、各ペダルストロークによって生成されるトルクが大きくなることに気付く可能性があります。
ドライバーを使用すると、ケーブルの直径が大きいほど、ネジを締めたり取り外したりしやすくなることがわかります。
トルク解決演習
1) 0.25mのレバーアームに45°の角度で50Nの力が加えられ、クランクが反時計回りに回転します。
データ:sin45º=√2/ 2
a)クランクにかかるトルクの方向と方向を決定します。
b)クランクにかかるトルクを計算します。
解像度
a)右手の法則によれば、トルクはハンドルの平面に垂直な方向にあり、その方向はドアの平面に向いています。
b)トルク式と運動データを使用して、次の計算を行います。
2) 物体の回転軸から25cmの距離に100N.mのトルクが加えられます。 この物体の回転面に垂直な力の大きさを決定し、3秒の時間間隔でこの物体が受ける角運動量の変化を計算します。
解像度
回転軸に垂直な力の強さを計算するには、トルクの定義と運動データを使用します。
この体が受ける角運動量の変化を決定するために、次の計算を行いましょう。

私によって。ラファエル・ヘラーブロック
ソース: ブラジルの学校- https://brasilescola.uol.com.br/fisica/torque-uma-forca.htm