Entraînez-vous sur les équations de la droite avec les exercices résolus et commentés, éliminez vos doutes et soyez prêt pour les évaluations et les examens d'entrée.
Les équations linéaires appartiennent au domaine des mathématiques appelé géométrie analytique. Ce domaine d'étude décrit des points, des lignes et des formes dans le plan et dans l'espace, à travers des équations et des relations.
La pente de la droite passant par les points A (0,2) et B (2,0) est
une) -2
b) -1
c) 0
d)2
e) 3
Calculez la valeur de t, sachant que les points A (0, 1), B (3, t) et C (2, 1) sont colinéaires.
à 1
b)2
c) 3
d) 4
e) 5
La condition d'alignement en trois points dit que le déterminant de la matrice est égal à zéro.
Selon la règle de Sarrus :
0.t.1 + 1.1.2 + 1.3.1 - (2.t.1 + 1.1.0 + 1.3.1) = 0
0 + 2 + 3 - (2t + 0 + 3) = 0
5 - 2t - 3 = 0
2 = 2t
t = 1
Les coefficients, angulaires et linéaires, de la droite x - y + 2 = 0 sont respectivement :
a) Coefficient angulaire = 2 et coefficient linéaire = 2
b) Coefficient angulaire = -1 et coefficient linéaire = 2
c) Coefficient angulaire = -1 et coefficient linéaire = -2
d) Coefficient angulaire = 1 et coefficient linéaire = 2
e) Coefficient angulaire = 2 et coefficient linéaire = 2
En écrivant l’équation sous forme réduite, on a :
La pente est le nombre qui multiplie x, donc 1.
Le coefficient linéaire est le terme indépendant, il vaut donc 2.
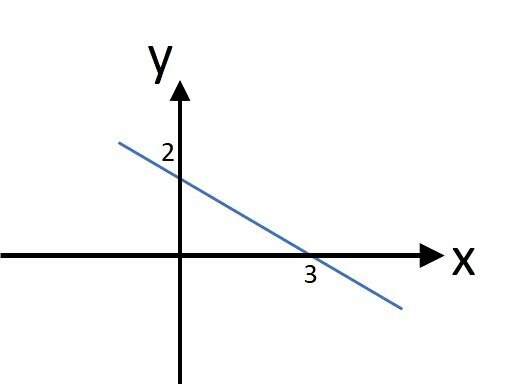
Obtenez l’équation de la droite qui correspond au graphique ci-dessous.
une) x + y - 6 = 0
b) 3x + 2y - 3 = 0
c) 2x + 3 ans - 2 = 0
d) x + y - 3 = 0
e) 2x + 3 ans - 6 = 0
Les points où la ligne coupe les axes sont (0, 2) et (3, 0).
En utilisant la forme paramétrique :
Comme les options de réponse sont sous forme générale, nous devons effectuer la somme.
Calculez le plus petit commun multiple pour être égal aux dénominateurs.
MMC(3, 2) = 6
Trouver les coordonnées du point d'intersection entre la droite r: x + y - 3 = 0 et la droite passant par les points A(2, 3) et B(1, 2).
une) (3, 2)
b) (2, 2)
c) (1, 3)
d) (2, 1)
e) (3, 1)
Déterminez la droite passant par les points A et B.
Calcul du coefficient angulaire :
La ligne est donc :
Le point d'intersection est la solution du système :
Ajout des équations :
En remplaçant dans la première équation :
Donc les coordonnées du point d'intersection des lignes sont (2, 1)
(PUC - RS) La droite r d'équation y = ax + b passe par le point (0, –1), et, pour chaque unité de variation de x, il y a une variation de y, dans le même sens, de 7 unités. Votre équation est
une) y = 7x – 1.
b) y = 7x + 1.
c) y = x – 7.
d) y = x + 7.
e) y = –7x – 1.
Un changement de 1 dans x entraîne un changement de 7 dans y. C'est la définition de la pente. L’équation doit donc avoir la forme :
y = 7x + b
Puisque le point (0, -1) appartient à la droite, nous pouvons le substituer dans l’équation.
De cette façon, l'équation est :
(IF-RS 2017) L'équation de la droite qui passe par les points A(0,2) et B(2, -2) est
a) y = 2x + 2
b) y = -2x -2
c) y = x
d) y = -x +2
e) y = -2x + 2
En utilisant l'équation réduite et les coordonnées du point A :
En utilisant les coordonnées du point B et en remplaçant la valeur de b = 2 :
Mise en place de l'équation :
(UNEMAT 2017) Soit r une droite d'équation r: 3x + 2y = 20. Une droite s le coupe au point (2,7). Sachant que r et s sont perpendiculaires l’un à l’autre, quelle est l’équation de la droite s ?
a) 2x − 3y = −17
b) 2x − 3y = −10
c) 3x + 2a = 17
d) 2x − 3y = 10
e) 2x + 3a = 10
Puisque les droites sont perpendiculaires, leurs pentes sont :
Pour déterminer la pente de r, nous changeons l’équation de la forme générale à la forme réduite.
La pente est le nombre qui multiplie x, soit -3/2.
Trouver le coefficient de la droite s :
Au fur et à mesure que les droites se coupent au point (2, 7), on substitue ces valeurs dans l'équation de la droite s.
Mise en place de l'équation réduite de la droite s :
Puisque les choix de réponses sont sous forme générale, nous devons effectuer une conversion.
(Enem 2011) Un programmeur visuel souhaite modifier une image, en augmentant sa longueur et en conservant sa largeur. Les figures 1 et 2 représentent respectivement l'image originale et celle transformée en doublant la longueur.
Pour modéliser toutes les possibilités de transformation dans la longueur de cette image, le programmeur doit découvrir le motifs de toutes les lignes qui contiennent les segments qui délimitent les yeux, le nez et la bouche, puis élaborent le programme.
Dans l'exemple précédent, le segment A1B1 de la figure 1, contenu dans la ligne r1, est devenu le segment A2B2 de la figure 2, contenu dans la ligne r2.
Supposons qu'en gardant constante la largeur de l'image, sa longueur soit multipliée par n, où n est un nombre entier et positif, et que, de cette manière, la ligne r1 subisse les mêmes transformations. Dans ces conditions, le segment AnBn sera contenu dans la ligne rn .
L'équation algébrique qui décrit rn, dans le plan cartésien, est
a) x + ny = 3n.
b) x - ny = - n.
c) x - ny = 3n.
d) nx + ny = 3n.
e) nx + 2ny = 6n.
Trouver la ligne r1 dans la figure originale :
Son coefficient angulaire est :
La ligne coupe l'axe y au point (0, 3), donc son équation est :
Trouver la ligne r2 dans la figure modifiée :
Son coefficient angulaire est :
La ligne coupe également l'axe y au point (0, 3), donc son équation est :
De l'équation de la figure originale à celle modifiée, le coefficient de y et le terme indépendant ont été multipliés par 2.
Donc, pour d'autres proportions :