Le vecteur est la représentation qui détermine l'amplitude, la direction et la direction d'une quantité vectorielle. Les vecteurs sont des segments droits orientés par une flèche à une extrémité.
Nous nommons les vecteurs avec une lettre et une petite flèche.
Les vecteurs caractérisent les quantités vectorielles, qui sont des quantités qui nécessitent une orientation, c'est-à-dire une direction et une direction. Quelques exemples sont: la force, la vitesse, l'accélération et le déplacement. La valeur numérique ne suffit pas, il faut décrire où agissent ces grandeurs.
module d'un vecteur
Le module du vecteur, ou intensité, est sa valeur numérique, suivie de l'unité de mesure de la grandeur qu'il représente, par exemple :
On indique le module entre les barres en gardant la flèche ou, juste la lettre, sans barres et sans flèche.
La longueur du vecteur est proportionnelle au module. Un vecteur plus grand représente un module plus grand.
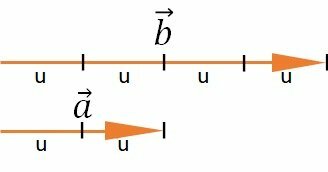
le module vectoriel est de 4 unités, tandis que le vecteur
est de 2 unités.
Direction d'un vecteur
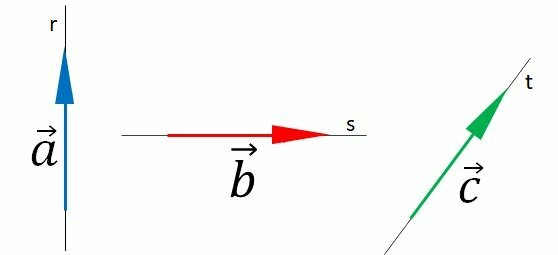
La direction du vecteur est la pente de la ligne d'appui sur laquelle il est déterminé. Il n'y a qu'une seule direction pour chaque vecteur.
sens d'un vecteur
La direction du vecteur est indiquée par la flèche. La même direction peut contenir deux directions, telles que haut ou bas et gauche ou droite.
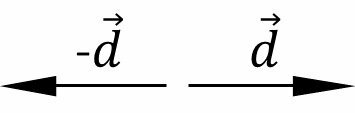
En adoptant une direction comme positive, la direction opposée, négative, est représentée par un signe moins avant le symbole vectoriel.
Vecteur résultant
Le vecteur résultant est le résultat d'opérations vectorielles et équivaut à un ensemble de vecteurs. Il est pratique de connaître le vecteur qui représente l'effet produit par plus d'un vecteur.
Par exemple, un corps peut être soumis à un ensemble de forces et on veut connaître le résultat qu'elles vont produire, toutes ensemble, sur ce corps. Chaque force est représentée par un vecteur, mais le résultat ne peut être représenté que par un seul vecteur: le vecteur résultant.

Le vecteur résultant, , de direction horizontale et de direction vers la droite, est le résultat des additions et soustractions des vecteurs.
,
,
et
. Le vecteur résultant montre une tendance du corps à se déplacer dans cette orientation.
Les vecteurs à direction verticale ont la même taille, c'est-à-dire le même module. Comme ils ont des sens opposés, ils s'annulent. Cela montre qu'il n'y aura pas de mouvement de la caisse dans le sens vertical.
Lors de l'analyse des vecteurs et
, qui ont la même direction et des directions opposées, on se rend compte qu'une partie de la force "reste" à droite, comme le vecteur
est plus grand que le
, c'est-à-dire le module de
c'est plus gros.
Pour déterminer le vecteur résultant, nous effectuons des opérations d'addition et de soustraction de vecteurs.
Addition et soustraction de vecteurs de même direction
Avec sens égaux, nous ajoutons les modules et gardons la direction et la direction.
Exemple:
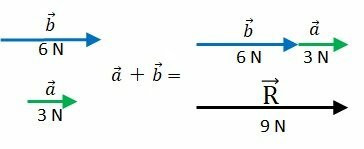
Graphiquement, nous plaçons les vecteurs en séquence, sans changer leurs modules. Le début de l'un doit coïncider avec la fin de l'autre.
La propriété commutative de l'addition est valide, car l'ordre ne change pas le résultat.
Avec sens opposés, on soustrait les modules et on garde la direction. La direction du vecteur résultant est celle du vecteur de plus grand module.
Exemple: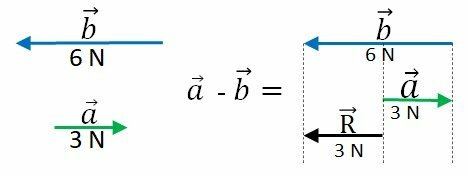
le vecteur est la partie restante de
, après avoir retiré
.
Soustraire un vecteur équivaut à ajouter l'opposé de l'autre.
Addition et soustraction de vecteurs perpendiculaires
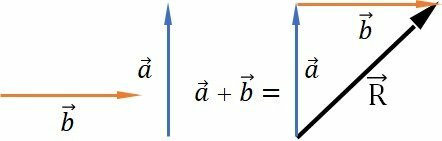
Pour additionner deux vecteurs avec des directions perpendiculaires, on déplace les vecteurs sans changer leur module, de sorte que le début de l'un coïncide avec la fin de l'autre.
Le vecteur résultant relie le début du premier à la fin du second.
Pour déterminer l'amplitude du vecteur résultant entre deux vecteurs perpendiculaires, nous faisons correspondre le début des deux vecteurs.
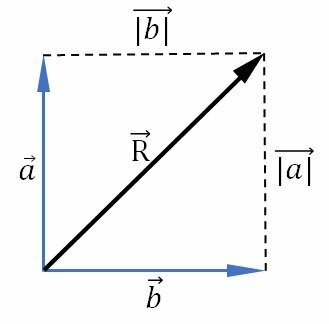
Le module du vecteur résultant est déterminé par le théorème de Pythagore.
Addition et soustraction de vecteurs obliques
Deux vecteurs sont obliques lorsqu'ils forment un angle entre leurs directions autre que 0°, 90° et 180°. Pour ajouter ou soustraire des vecteurs obliques, les méthodes du parallélogramme et de la ligne polygonale sont utilisées.
méthode du parallélogramme
Pour effectuer la méthode, ou la règle, du parallélogramme entre deux vecteurs et dessiner le vecteur résultant, nous suivons ces étapes :
La première étape consiste à positionner leurs origines au même point et à tracer des lignes parallèles aux vecteurs pour former un parallélogramme.
La seconde consiste à tracer un vecteur diagonal sur le parallélogramme, entre l'union des vecteurs et l'union des droites parallèles.

Les lignes pointillées sont parallèles aux vecteurs et la figure géométrique formée est un parallélogramme.
Le vecteur résultant est la ligne reliant l'origine des vecteurs aux parallèles.
O module du vecteur résultant est obtenu par la loi du cosinus.
Où:
R est la grandeur du vecteur résultant;
a est le module vectoriel ;
b est le module du vecteur ;
est l'angle formé entre les directions des vecteurs.
La méthode du parallélogramme est utilisée pour ajouter une paire de vecteurs. Si vous souhaitez ajouter plus de deux vecteurs, vous devez les ajouter deux par deux. Au vecteur résultant de la somme des deux premiers, on ajoute le troisième et ainsi de suite.
Une autre façon d'ajouter plus de deux vecteurs consiste à utiliser la méthode de la ligne polygonale.
méthode de ligne polygonale
La méthode de la ligne polygonale est utilisée pour trouver le vecteur résultant de l'ajout de vecteurs. Cette méthode est particulièrement utile lors de l'ajout de plus de deux vecteurs, tels que les vecteurs suivants ,
,
et
.
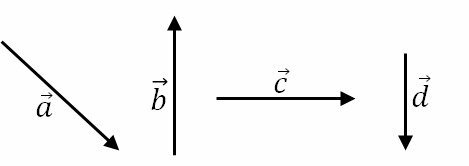
Pour utiliser cette méthode, nous devons ordonner les vecteurs de manière à ce que la fin de l'un (flèche) coïncide avec le début de l'autre. Il est important de conserver le module, la direction et la direction.
Après avoir disposé tous les vecteurs sous la forme d'une ligne polygonale, il faut tracer le vecteur résultant qui va du début du premier à la fin du dernier.
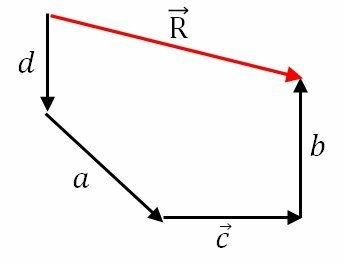
Il est important que le vecteur résultant ferme le polygone, avec sa flèche coïncidant avec la flèche du dernier vecteur.
La propriété commutative est valide, puisque l'ordre dans lequel nous plaçons les vecteurs de tracé ne change pas le vecteur résultant.
décomposition vectorielle
Décomposer un vecteur, c'est écrire les composantes qui composent ce vecteur. Ces composants sont d'autres vecteurs.
Chaque vecteur peut être écrit comme une composition d'autres vecteurs, à travers une somme vectorielle. En d'autres termes, nous pouvons écrire un vecteur comme étant la somme de deux vecteurs, que nous appelons composants.
En utilisant un système de coordonnées cartésiennes, avec des axes x et y perpendiculaires, nous déterminons les composantes du vecteur.
le vecteur est le résultat de la somme vectorielle entre les vecteurs composants.
et
.
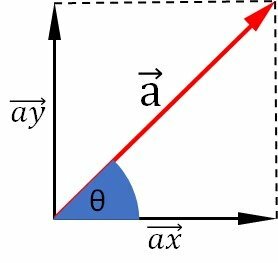
le vecteur inclinaison
forme un triangle rectangle avec l'axe des x. Ainsi, nous déterminons les modules des vecteurs composants à l'aide de la trigonométrie.
Axe de module de composant.
Module composant ay.
le module vectoriel est obtenu à partir du théorème de Pythagore.
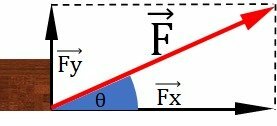
Exemple
Une force est exercée en tirant un bloc du sol. La force de module de 50 N est inclinée de 30° par rapport à l'horizontale. Déterminer les composantes horizontale et verticale de cette force.
Données:
Multiplication d'un nombre réel par un vecteur
En multipliant un nombre réel par un vecteur, le résultat sera un nouveau vecteur, qui a les caractéristiques suivantes :
- Même sens si le nombre réel est différent de zéro ;
- Même sens, si le nombre réel est positif, et dans le sens inverse s'il est négatif ;
- Le module sera le produit du module du nombre réel et du module du vecteur multiplié.
Produit entre un nombre réel et un vecteur
Où: est le vecteur résultant de la multiplication ;
est le nombre réel ;
est le vecteur multiplié.
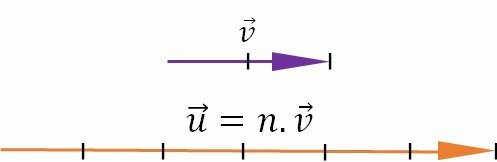
Exemple
Soit le nombre réel n = 3 et le vecteur de modulo 2, le produit entre eux est égal à :
Calcul des modules
La direction et la direction seront les mêmes.
Exercice 1
(Enem 2011) La force de frottement est une force qui dépend du contact entre les corps. Il peut être défini comme une force opposée à la tendance au déplacement des corps et est généré en raison d'irrégularités entre deux surfaces en contact. Sur la figure, les flèches représentent les forces agissant sur le corps et le point agrandi représente les irrégularités qui existent entre les deux surfaces.

Sur la figure, les vecteurs qui représentent les forces qui provoquent le déplacement et le frottement sont respectivement :
Les) 
B) 
ç) 
ré) 
et) 
Bonne réponse: lettre a) 
Les flèches représentent les vecteurs de forces qui agissent dans le mouvement dans le sens horizontal, étant une paire action-réaction, elles ont des directions opposées.
Les flèches verticales représentent les actions de la Force Poids et de la Force Normale et, comme elles sont égales, elles s'annulent, sans mouvement dans le sens vertical.
Exercice 2
(UEFS 2011) Le diagramme vectoriel de la figure décrit les forces exercées par deux élastiques sur une dent d'une personne subissant un traitement orthodontique.
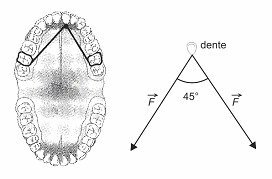
En supposant F = 10,0N, sen45° = 0,7 et cos45° = 0,7, l'intensité de la force appliquée par les élastiques sur la dent, en N, est égale à
a) 3√10
b) 2√30
c) 2√85
d) 3√35
e) 2√45
Bonne réponse: c) 2√85
L'intensité de la force appliquée à la dent est obtenue par la loi des cosinus.
a et b sont égaux à 10 N.
La factorisation de la racine carrée nous donne :
Par conséquent, l'intensité de la force résultante appliquée par les élastiques sur la dent est .
Exercice 3
(PUC RJ 2016) Les forces F1, F2, F3 et F4, sur la figure, forment des angles droits l'une par rapport à l'autre et leurs modules sont respectivement 1 N, 2 N, 3 N et 4 N.
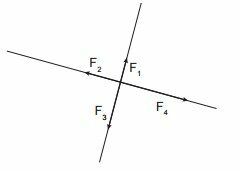
Calculer le module de la force nette, en N.
a) 0
b) 2
c) 2
d) 2√ 2
e) 10
Bonne réponse: d) 2√ 2
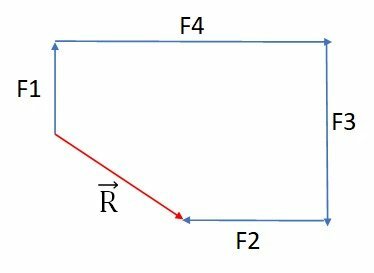
Nous utilisons la méthode de la ligne polygonale pour déterminer le vecteur résultant. Pour ce faire, nous réorganisons les vecteurs de sorte que la fin de l'un coïncide avec le début de l'autre, comme ceci :
En utilisant un système de coordonnées avec l'origine au début du vecteur résultant, nous pouvons déterminer les modules de ses composants, comme suit :
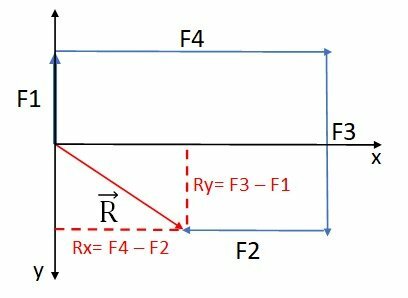
Ainsi, nous devons :
Ry = 3 - 1 = 2 N
Rx = 4 - 2 = 2 N
L'amplitude du vecteur résultant est déterminée par le théorème de Pythagore.
Par conséquent, le module de la force nette est égal à .
en savoir plus sur
- Vecteurs: addition, soustraction et décomposition.
- Quantités vectorielles
✖