
A staatiline ja klassikalise mehaanika valdkond vastutab tasakaaluseisundis olevate osakeste või jäikade kehade süsteemide uurimise eest. Selles valdkonnas uurime selliseid mõisteid nagu massikese, pöördemoment, nurkimment, kang ja tasakaal.
Loe ka: Kinemaatika - mehaanika valdkond, mis uurib kehade liikumist
kokkuvõte staatilisest
- Staatika uurimine teeb võimalikuks hoonete, sildade, autode, monumentide, kiikude ja palju muu ehituse ja stabiilsuse.
- Staatikas uuritakse massikeskme, tasakaalu, kangi, pöördemomendi, nurkimpulsi mõisteid ja rakendusi.
- Massikese arvutatakse osakeste massi ja nende asukoha süsteemis aritmeetilise keskmise kaudu.
- Pöördemoment arvutatakse tekitatud jõu, kangi hoova ning kauguse ja jõu vahelise nurga korrutisena.
- Nurkmoment arvutatakse objekti kauguse pöörlemisteljest, lineaarmomendi ning kauguse ja lineaarimpulsi vahelise nurga korrutisena.
Mida staatika uurib?
Staatilised uuringud jäigad kehad või osakesed puhkeolekus, olles staatiline, sest nende jõud ja hetked tühistavad üksteist igas suunas, tasakaalu esilekutsumine, koos
selle abil saame määrata selle süsteemi sisemised jõud.
Mille jaoks on staatiline?
Staatika uurimine on laialt levinud kasutatakse sildade, hoonete, majade, mööbli, autode, uste, akende ehitamisel, lõpuks kõik, mis vajab tasakaalu. O hoobade uurimine võimaldab mõista ja valmistada kärusid, haamreid, pähklipurejaid, taignakonkse, õngeritvaid, kiikesid ja palju muud. Lisaks võimaldab nurkhoo uurimine parandada uisutajate, jalgrattarataste ja pöördtoolide pöördeid.
Vaata ka: Mis on tugevuse mõiste?
Olulised staatilised mõisted
- Massikese: See on punkt, kuhu koguneb kogu füüsilise süsteemi või osakese mass. See ei ole alati kehas, nagu rõnga puhul, milles selle
- massikese on keskel, kus materjali pole. Selle kontseptsiooni kohta lisateabe saamiseks klõpsake nuppu siin.
- Saldo: on olukord, kus kõigi kehale mõjuvate jõudude ja momentide summa on null, hoides keha muutumatuna.
-
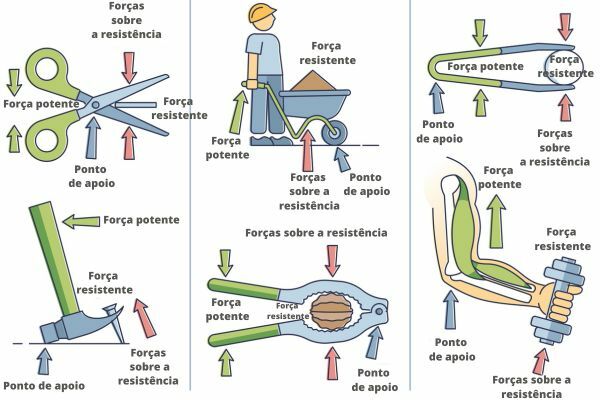
Hoob: See on lihtne masin, mis on võimeline ülesande täitmist lihtsustama ning võib olla ühendatud, interpotentne ja vastastikku vastupidav.
- A kanginterfiks sellel on tugipunkt tugeva jõu ja vastupanujõu vahel, nagu kääride, tangide, kiigu ja vasara puhul.
- A kangvastastikune sellel on vastupidav jõud tugeva jõu ja tugipunkti vahel, nagu pähklipureja, pudeliavaja ja käru puhul.
- A kanginterpotentne sellel on võimas jõud vastupidava jõu ja tugipunkti vahel, nagu pintsettide, küünekääride ja mõne kulturismiharjutuse puhul.
- Pöördemoment: mida nimetatakse ka jõumomendiks, on füüsikaline suurus, mis tekib siis, kui rakendame jõudu kehale, mis on võimeline pöörlema, pöörduma nagu pöörleva ukse avamine. Selle kontseptsiooni kohta lisateabe saamiseks klõpsake nuppu siin.
- Nurkmoment: See on füüsikaline suurus, mis annab teavet pöörlevate, pöörlevate või kõverate kehade liikumise suurusest.
Staatika peamised valemid
→ Massi valemite keskpunkt
\(X_{CM}=\frac{m_1\cdot x_1+m_2\cdot x_2 +m_3\cdot x_3}{m_1+m_2+m_3 }\)
see on
\(Y_{CM}=\frac{m_1\cdot y_1+m_2\cdot y_2 +m_3\cdot y_3}{m_1+m_2+m_3 }\)
xcm on osakeste süsteemi massikeskme asukoht horisontaalteljel.
ycm on osakeste süsteemi massikeskme asukoht vertikaalteljel.
m1, m2 see on m3 on osakeste massid.
x1, x2 see on x3 on osakeste asukohad horisontaalteljel.
y1, y2 see on y3 on osakeste asukohad vertikaalteljel.
→ Kangi valem
\(F_p\cdot d_p=F_r\cdot d_r\)
FP on tugev jõud, mõõdetuna njuutonites [N].
dP on tugeva jõu kaugus, mõõdetuna meetrites [m].
Fr on takistusjõud, mõõdetuna njuutonites [N].
dr on takistusjõu kaugus, mõõdetuna meetrites [m].
→ Pöördemomendi valemid
\(τ=r\cdot F\cdot sinθ\)
τ on toodetud pöördemoment, mõõdetuna N∙m.
r on kaugus pöörlemisteljest, mida nimetatakse ka hoovaks, mõõdetuna meetrites [m].
F on toodetav jõud, mõõdetuna Newtonites [Ei].
θ on kauguse ja jõu vaheline nurk, mõõdetuna kraadides [°].
Kui nurk on 90º, võib pöördemomendi valemit esitada järgmiselt:
\(τ=r\cdot F\)
τ on toodetud pöördemoment, mõõdetuna [N∙m].
r on kaugus pöörlemisteljest, mida nimetatakse ka hoovaks, mõõdetuna meetrites [m].
F on toodetav jõud, mõõdetuna Newtonites [Ei].
→ Angular Momentum Formula
\(L=r\cdot p\cdot sinθ\)
L on nurkimment, mõõdetuna [kg∙m2/s].
r on kaugus objekti ja pöörlemistelje või raadiuse vahel, mõõdetuna meetrites [m].
P on lineaarne impulss, mõõdetuna [kg∙m/s].
θ on nurk vahel r see on K, mõõdetuna kraadides [°].
Tea rohkem: Hüdrostaatika – füüsika haru, mis uurib vedelikke staatilise tasakaalu tingimustes
Lahendas harjutusi staatikast
01) (UFRRJ-RJ) Oletame alloleval joonisel, et poiss surub ust jõuga Fm = 5 N, mis toimib hingedest 2 m kaugusel (pöörlemistelg) ja et mees avaldab jõudu FH = 80 N, 10 cm kaugusel pöörlemisteljest.
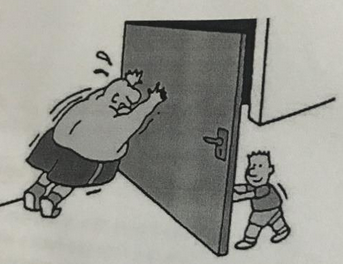
Nendel tingimustel võib öelda, et:
a) uks pöörduks sulgemise suunas.
b) uks pöörduks avamise suunas.
c) uks ei pöörle üheski suunas.
d) mehe poolt uksele rakendatud momendi väärtus on suurem kui poisi poolt rakendatud momendi väärtus.
e) uks pöörduks sulgemise suunas, sest mehe mass on suurem kui poisi mass.
Resolutsioon:
Alternatiiv B. Uks pöörduks avamise suunas. Selleks arvutage lihtsalt mehe pöördemoment järgmise valemi abil:
\(τ_h=r\cdot F\)
\(τ_h=0,1\cdot80\)
\(τ_h=8N\cdot m\)
Ja poisi pöördemoment:
\(τ_m=r\cdot F\)
\(τ_m=2\cdot 5\)
\(τ_m=10N\cdot m\)
Niisiis, näete, et poisi pöördemoment on suurem kui mehe pöördemoment, nii et uks avaneb.
02) (Enem) Eksperimendi käigus viis õpetaja klassiruumi riisikoti, kolmnurkse puutüki ning silindrilise ja homogeense raudkangi. Ta tegi ettepaneku mõõta varda massi nende objektide abil. Selleks tegid õpilased kangile märgid, jagades selle kaheksaks võrdseks osaks ja seejärel toetades selle peale kolmnurkne alus, mille ühest otsast rippub riisikott, kuni saavutatakse tasakaal.

Kui suur oli antud olukorras õpilaste saadud lati mass?
a) 3,00 kg
b) 3,75 kg
c) 5,00 kg
d) 6,00 kg
e) 15,00 kg
Resolutsioon:
E alternatiiv. Arvutame õpilaste saadud varda massi kangi valemi abil, milles võrdleme tugevat jõudu takistusjõuga:
\(F_p\cdot d_p=F_r\cdot d_r\)
Jõud, mida riis avaldab, on see, mis takistab kangi liikumist, seega:
\(F_p\cdot d_p=F_{riis}\cdot d_{riis}\)
Riisile mõjuv jõud ja tugev jõud on kaalujõud, seega:
\(P_p\cdot d_p=P_{riis}\cdot d_{riis}\)
\(m_pg\cdot d_p=m_{riis}\cdot g\cdot d_{riis}\)
\(m_p\cdot10\cdot1=5\cdot10\cdot3\)
\(m_p\cdot10=150\)
\(m_p=\frac{150}{10}\)
\(m_p=15 kg\)
Allikad
HALLIDAY, David; RESNICK, Robert; WALKER, Jaarl. Füüsika alused: Mehaanika.8. toim. Rio de Janeiro, RJ: LTC, 2009.
NUSSENZVEIG, Herch Moyses. füüsika algkursus: Mehaanika (kd. 1). 5 ed. Nii et Paulo: Blucher, 2015.
