
Lösa systemlinjär det är en mycket återkommande uppgift för studier inom naturvetenskap och matematik. Sökandet efter okända värden ledde till utvecklingen av metoder för att lösa linjära system, såsom tilläggs-, jämlikhets- och substitutionsmetod för system som har två ekvationer och två okändaoch Crammers regel och skalning, som löser linjära system med två ekvationer, men som är mer praktiska för system med fler ekvationer. Ett linjärt system är en uppsättning av två eller flera ekvationer med en eller flera okända.
Läs också:Vad är förhållandet mellan matriser och linjära system?
linjär ekvation
Arbetet med ekvationer finns på grund av måste hitta okända okända värden. Vi kallar det en ekvation när vi har ett algebraiskt uttryck med jämlikhet, och det klassificeras som linjärt när den största exponenten av dess okända är 1, som visas i följande exempel:
2x + y = 7 → linjär ekvation med två okända
a + 4 = -3 → linjär ekvation med en okänd
Generellt kan en linjär ekvation beskrivas av:
De1x1 + den2x2 + a3x3... + aNejxNej = c
Vi känner som ett ekvationssystem när det finns mer än en linjär ekvation. Vi börjar med linjära system med två okända.
Lösa linjära system
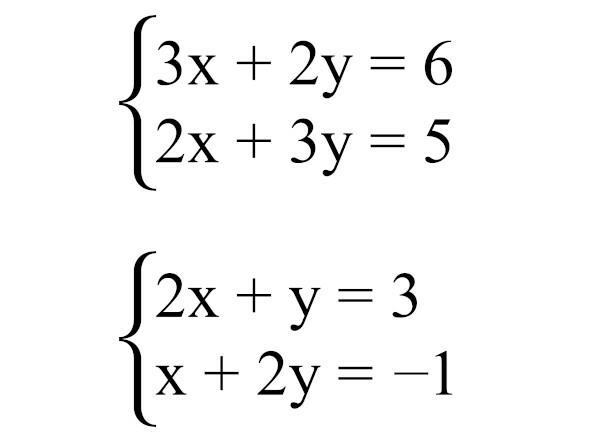
Linjära system med två första grads ekvationer och två okända
För att lösa ett system med två ekvationer och två okända finns det flera metoder, de tre mest kända är:
- jämförelsemetod
- tilläggsmetod
- substitutionsmetod
Vilken som helst av de tre kan lösa ett linjärt system med två ekvationer och två okända. Dessa metoder är inte lika effektiva för system med fler ekvationer, eftersom det finns andra specifika metoder för att lösa dem.
Ersättningsmetod
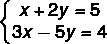
Ersättningsmetoden består av isolera en av de okända i en av ekvationerna och utföra substitutionen i den andra ekvationen.
Exempel:
Första steget: isolera en av de okända.
Vi kallar I den första ekvationen och II den andra ekvationen. Analysera de två, låt oss välj det okända som är lättast att isolera. Observera att i ekvation I → x + 2y = 5, x har ingen koefficient, vilket gör det lättare att isolera, så vi skriver om ekvation jag gillar det här:
I → x + 2y = 5
I → x = 5 - 2y
2: a steget: ersätt I i II.
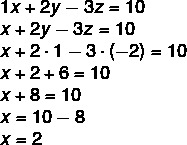
Nu när vi har ekvation I med x ensam, i ekvation II, kan vi ersätta x med 5 - 2y.
II → 3x - 5y = 4
Ersätter x med 5 - 2y:
3 (5 - 2y) - 5y = 4
Nu när ekvationen bara har en okänd är det möjligt att lösa den för att hitta värdet på y.

När vi känner till värdet på y hittar vi värdet på x genom att ersätta värdet på y i ekvation I.
I → x = 5 - 2y
x = 5 - 2 · 1
x = 5 - 2
x = 3
Så lösningen på systemet är S = {3,1}.
Jämförelsemetod
Jämförelsemetoden består av isolera en okänd i de två ekvationerna och utjämna dessa värden.
Exempel:

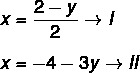
Första steget: låt jag vara den första ekvationen och II den andra, låt oss isolera en av de okända i I och II. Väljer att isolera det okända x måste vi:
2: a steget: jämföra de två nya ekvationerna, eftersom x = x.
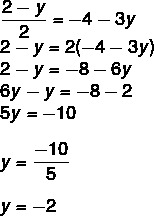
3: e steget: ersätt värdet på y med -2 i en av ekvationerna.
x = -4 - 3y
x = -4 - 3 (-2)
x = -4 + 6
x = 2
Så lösningen på detta system är uppsättningen S = {2, -2}.
Se också: Vad är skillnaderna mellan funktion och ekvation?
tilläggsmetod
Tilläggsmetoden består i att utföra multiplikationen av alla termer för en av ekvationerna, på ett sådant sätt att när lägga till ekvation I till ekvation II, är en av dess okända lika med noll.
Exempel:
Första steget: multiplicera en av ekvationerna så att koefficienterna är motsatta.
Observera att om vi multiplicerar ekvation II med 2 har vi 4y i ekvation II och -4y i ekvation I, och att med vi lägger till I + II, vi får 0y, så låt oss multiplicera alla termer i ekvation II med 2 så att detta hända.
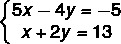
I → 5x - 4y = -5
2 · II → 2x + 4y = 26
2: a steget: utför summan I + 2 · II.
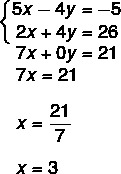
3: e steget: ersätt värdet x = 3 till en av ekvationerna.

Linjära system med tre 1-graders ekvationer och tre okända
När systemet har tre okända använder vi andra lösningsmetoder. Alla dessa metoder relaterar koefficienter till matriser, och de mest använda metoderna är Crammers regel eller skalning. För upplösningen i båda metoderna är det nödvändigt matrisrepresentationen av systemet, även 2x2-systemet kan representeras med hjälp av en matris. Det finns två möjliga representationer, den fullständiga matrisen och den ofullständiga matrisen:
Exempel:
Systemet
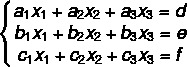
Kan representeras av full matris

Och för ofullständig matris

Crammers regel
För att hitta lösningar för ett 3x3-system, med okända x, y och z, med hjälp av Crammers regelär det nödvändigt att beräkna determinanten för den ofullständiga matrisen och dess variationer. Så vi måste:
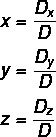
D → determinant för systemets ofullständiga matris.
Dx → determinant för systemets ofullständiga matris och ersätter kolumnen x med kolumnen med oberoende termer.
Dy → determinant för systemets ofullständiga matris och ersätter kolumnen y med kolumnen med oberoende termer.
Dz → determinant för systemets ofullständiga matris och ersätter kolumnen z med kolumnen med oberoende termer.
Så för att hitta värdet på dina okända måste vi först beräkna determinant D, Dx, Dy kopplat till systemet.
Exempel:
Första steget: beräkna D.

2: a steget: beräkna Dx.
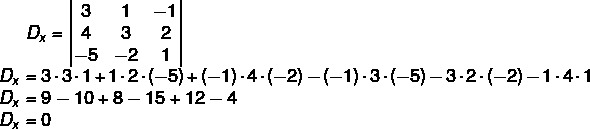
3: e steget: då kan vi hitta värdet på x, för:

4 steg: beräkna Dy.
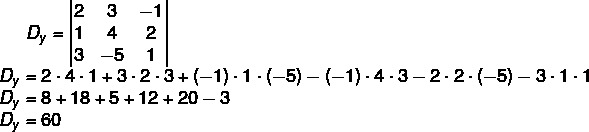
5: e steget: då kan vi beräkna värdet på y:
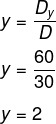
Sjätte steget: nu när vi vet värdet på x och y, kan vi i endera raden hitta värdet på z genom att ersätta värdet på x och y och isolera z. Ett annat alternativ är att beräkna Dz.
Ersätter x = 0 och y = 2 i den första ekvationen:
2x + y - z = 3
2 · 0 + 2 - z = 3
0 + 2 - z = 3
-z = 3 - 2
-z = -1 (-1)
z = -1
Därför är systemlösningen anbudet (0,2, -1).
Också tillgång: Problemlösning med ekvationssystem
skalning
En annan metod för att lösa linjära system är skalning, där vi endast använder hela matrisen och operationerna mellan linjerna för att isolera deras okända. Låt oss skala systemet nedan.
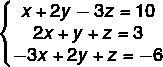
Första steget: skriv hela matrisen som representerar systemet.

vara L1, L2 och jag3 respektive rad 1, 2 och 3 i matrisen kommer vi att utföra operationer mellan L1 och jag2 och jag1 och jag3, så att resultatet gör att termerna i den första kolumnen i andra och tredje raden är lika med noll.
Analysera den andra raden i matrisen, låt oss ersätta den med resultatet av L2 → -2 · L1 + L2, för att nollställa termen a21.
De21 = -2 · 1 + 2 = 0
De22 = -2 · 2 + 1 = -3
De23 = -2 · (-3) + 1 = 7
De24 =-2 · 10 + 3 = -17
Så L2 blir 0 -3 7-17.
Analysera den tredje raden i matrisen, låt oss ersätta den med resultatet av L3 → 3L1 + L2, för att återställa termen till31.
De31 = 3 · 1 – 3 = 0
De32 = 3 · 2 + 2 = 8
De33 = 3 · (-3) +1 = -8
De34 = 3 · 10 – 6 = 24
Så L3 blir 0 8-8 24.
Observera att alla är delbara med 8, så att L-linjen3 gör det enklare, låt oss dela det med 8.
L3 → L3 : 8 blir: 0 1-1 3.
Så den nya matrisen i den skalade ekvationen kommer att vara:
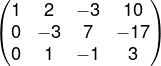
Nu är målet att återställa kolumn y i tredje raden, vi kommer att utföra operationer mellan L2 och jag3, med målet att återställa den andra kolumnen i en av dem.
Vi kommer att ersätta L3 med L3 → L2 + 3L3.
De31 = 0 + 3 · 0 = 0
De32 = -3 + 3 · 1 = 0
De33 = 7 + 3 · (-1) = 4
De34 = -17 + 3 · 3 = -8
Så L3 kommer att vara: 0 0 4 -8.
Den nya skalade matrisen kommer att vara:
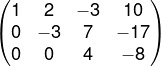
När vi nu representerar denna matris som ett system igen och lägger till x, y och z i kolumnerna, kommer vi att hitta följande:
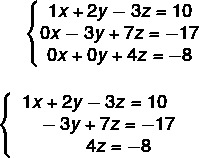
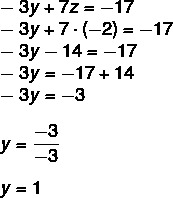
Vi kan sedan hitta värdet på var och en av de okända. När vi analyserar ekvation III måste vi:

Om z = -2, låt oss ersätta värdet för z i den andra ekvationen:
Slutligen, i den första ekvationen, låt oss ersätta värdet på y och z för att hitta värdet på x.
Se också: 1: a gradens ojämlikhetssystem - hur man löser det?
linjär systemklassificering
Ett linjärt system är en uppsättning linjära ekvationer, som kan ha flera okända och flera ekvationer. Det finns flera metoder för att lösa det, oavsett antalet ekvationer. det finns tre betyg för ett linjärt system.
- Bestämt möjligt system (SPD): när du har en enda lösning.
- Obestämt möjligt system (SPI): när det har oändliga lösningar.
- omöjligt system(SI): när det inte finns någon lösning.
Övningar lösta
fråga 1 (IFG 2019) Tänk på summan av mätningarna på en bas och höjden i förhållande till basen i en triangel lika med 168 cm och skillnaden lika med 24 cm. Det är korrekt att ange att mätningarna av basen respektive höjden i förhållande till detta basmått:
a) 72 cm och 96 cm
b) 144 cm och 24 cm
c) 96 cm och 72 cm
d) 24 cm och 144 cm
Upplösning
Alternativ C.
Låt h → höjd och b → bas, då har vi följande system:

Med tilläggsmetoden måste vi:

För att hitta värdet på h, låt oss ersätta b = 96 cm i den första ekvationen:
b + h = 168
96 + h = 168
h = 168 - 96
h = 72 cm
fråga 2 Den ofullständiga matrisen som representerar följande linjära system är:

Upplösning
Alternativ C.
Den ofullständiga matrisen är en som har koefficienterna x, y och z, så det blir en 3x3 matris. Att analysera alternativen, den som innehåller 3x3-matrisen med rätt tecken är bokstaven C.
Av Raul Rodrigues de Oliveira
Mattelärare
Källa: Brazil School - https://brasilescola.uol.com.br/matematica/sistemas-lineares.htm

