영형 운동제복 가구가 들어올 때 발생 일직선 그리고 속도일정한. 균일 한 움직임에서 모바일은 공백같음 에 휴식같은 시간의.
참조: 운동학 소개
다음 상황을 상상해보십시오: 이동하는 차량 운동제복, 속도 20km / h,의 초기 위치에서 이동합니다. 10km, 시간 범위 0,5H (30 분). 1 시간 후에는 동일한 전차가 초기 위치에서 멀어 질 것입니다. 20km.
모든 동정유니폼절대로 필요한 것발생하다에선직진, 이런 유형의 운동에서 없기 가속. 이해: 가구가 이동 방향을 변경하려면 다음 사항이 필요합니다. 힘 그것을 인쇄하여 행동 가속 모바일 게인을 새로운 속도 요소로 만듭니다.
지금 멈추지 마세요... 광고 후 더 있습니다;)
균일 한 동작 공식
균일 한 동작을 설명하고 각 변수의 의미를 이해하는 데 사용되는 몇 가지 공식을 확인하십시오.

S- 가구의 끝 위치
에스0 — 모바일 홈 위치
V — 모바일 속도
티 -시간 간격

V - 평균 속도
에스 — 변위
티 -시간 간격
무브먼트의 참조 및 분류
신체의 움직임을 정확하게 정의하기 위해서는 기준 좌표계를 선택해야합니다. 물리학에서 우리는 참조가 관찰자가 자신을 찾는 위치라는 것을 이해합니다. 아래 그림은 수평 방향을 따라 다른 방향으로 움직이는 일부 차량을 보여줍니다.
그림에서 채택 된 기준 프레임 (점 0으로 표시됨)은 관찰자가있는 곳입니다. 이 참고 자료에 따르면 왼쪽의 자동차는 위치부정, 오른쪽에있는 자동차는 위치양.

참조는 움직임의 방향을 나타냅니다.
그것을 깨닫는 것이 중요합니다 다른 참조를 선택하면 각 차량의 초기 위치와 이동의 분류가 변경됨을 의미합니다.. 아래 그림은 선택한 프레임 워크가 인식하는 것을 보여줍니다. 왼쪽에있는 주황색 자동차와 은색 자동차가 멀리 이동하고 오른쪽에있는 은색 자동차가 접근합니다..
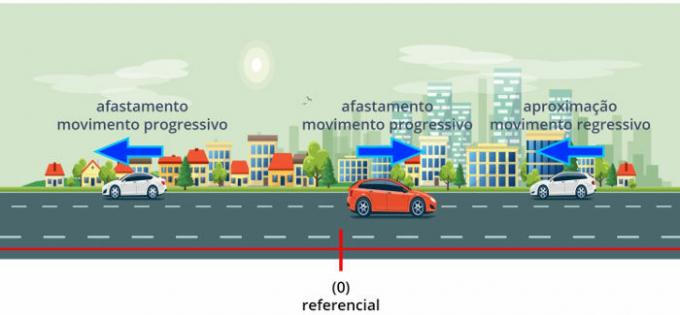
가구가 기준틀에 가까워지면 그 움직임은 회귀. 모바일이 기준에서 멀어지면 이동은 진보적 인. 또한, 우리는 운동진보적 인 영형 신호양 속도를 위해. 에 대한 회귀 운동, 우리는 신호부정, 이는 모바일과 참조 사이의 거리가 감소합니다. 시간과 함께.
프로그레시브 및 레트로 그레이드 모션 비디오 클래스
평균 속도
로버의 평균 속도는 이동이 발생한 시간 간격의 변위 비율 (ΔS)로 제공됩니다. 변위 (ΔS)는 차례로 위치결정적인 과 머리 글자 가구의.

V - 평균 속도
에스 — 변위
티 -시간 간격
평균 속도에 대한 공식에서 우리는 배수량. 가구의 위치를 알면 가구의 변위를 쉽게 계산할 수 있습니다 (S0 — 시작 위치) 및 그가 도착한 위치 (S에프 -끝 위치)로 구분됩니다. 단절에시각 (Δt), 사이의 시간 차이로 계산 순간결정적인 과 머리 글자 (Δt = t에프 – t0). 이 공식을 아래에서 더 자세히 확인하십시오.

속도 측정 장치
속도 측정 단위, 국제 시스템 (SI), 그리고 지하철당둘째 (m / s). 그러나 다음과 같은 다른 공통 단위가 있습니다. 킬로미터당시 (km / h). 초당 미터를 시간당 킬로미터로 쉽게 변환 할 수 있습니다. 그것을하기 위해, 단지 곱하다 또는 나누기계수 3.6에 의한 속도 계수, 다음 그림과 같이 :

예 :
72 km / h / 3,6 = 20 m / s
108 km / h /3,6 = 30 m / s
마인드 맵: 균일 한 움직임
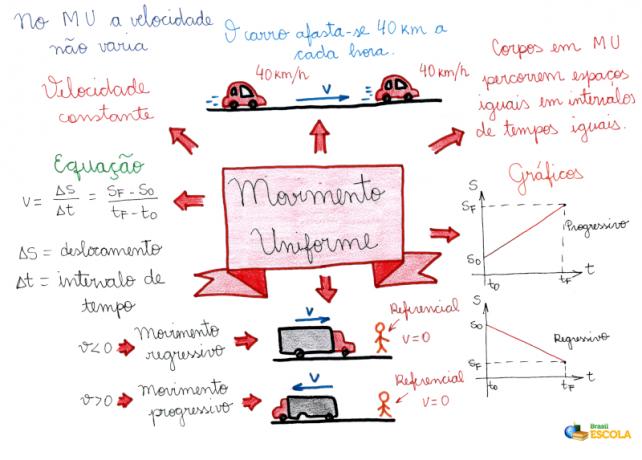
* 마인드 맵을 PDF로 다운로드하려면 여기를 클릭하세요!
균일 한 모션 그래픽
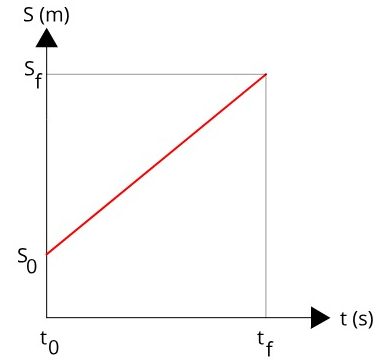
우리는 공감할 수 있습니다 시간에 따른 가구의 위치 그래픽을 사용합니다. 부드러운 동작을 위해 위치 대 시간 그래프는 다음과 같은 직선을 형성합니다. 쪽으로 또는 낮은, 운동 관련 진보적 인 과 회귀, 각기. 위치 대 시간 그래프의 예를 참조하십시오. 운동제복프로그레시브 :
보기또한:힘과 움직임
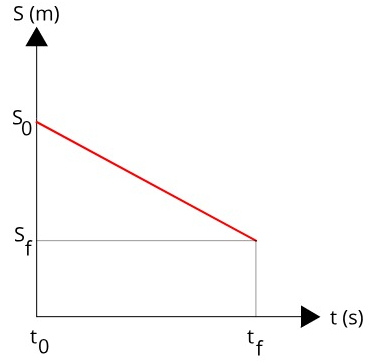
아래 그림에는 다음을 수행하는 모바일의 시간 함수로서 위치를 나타내는 그래프가 있습니다. 운동제복 과 회귀 (또는 역행).
위치 대 시간 그래프를 사용하여 속도 운동의. 이를 위해 모바일의 속도가 접선, 즉 체포반대말 (ΔS) 및 인접한 다리 직선 (Δt).
균일 한 동작에 대한 속도 대 시간 그래프는 직선입니다. 평행 모듈의 수평축에 부정 또는 양, 분류에 따라 (점진적 또는 회귀 적). 속도 그래프를 통해 로버의 변위를 계산할 수 있습니다.이를 위해 선 아래 영역의 계수를 간단히 결정합니다.
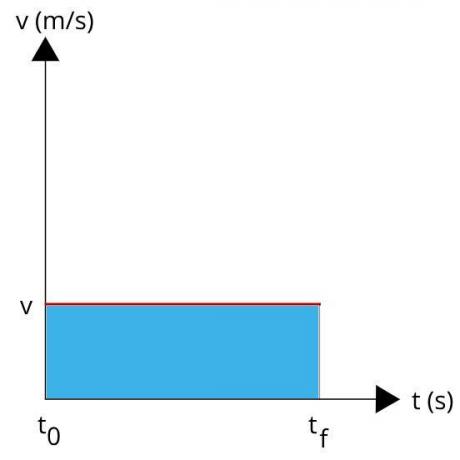
이전 그래프에서 파란색으로 칠해진 영역은 수치 적으로 a의 영역과 같습니다. 직사각형이 면적은 다음 공식을 사용하여 계산할 수 있습니다.

THE- 지역
비 —베이스 에지
H -높이
보기또한: 균일 한 모션 그래픽
균등하게 다양한 움직임
영형 운동고르게여러 가지 잡다한 시간이 지남에 따라 속도가 꾸준히 증가하거나 감소하는 움직임입니다. 이러한 유형의 움직임은 반드시 직선적 인 것은 아니며 가속 일정한. MUV에 대해 더 알고 싶다면 여기에.
보기또한: 운동학 운동을 해결하는 방법?
균일 한 움직임에 대한 연습
1) 모바일은 시작 위치 S에서 시작합니다.0 =-15m, 12 초 후 위치 S에프 = 45m.
a)이 로버의 평균 속도를 결정하십시오.
b) 로버 위치의 시간별 기능을 결정합니다.
c) t = 0 s, t = 1 s, t = 2 s, t = 3 s 및 t = 4 s에 대한 모바일 위치를 계산합니다. 그런 다음 해당 이동에 대한 위치 대 시간 그래프를 작성하십시오.
d)이 가구가 묘사하는 움직임을 평가하십시오.
해결
그만큼) 이 움직임의 평균 속도를 계산하기 위해 평균 속도 공식을 사용합니다.

운동 성명서에서 제공하는 데이터를 삽입하여 다음 계산을 수행합니다.
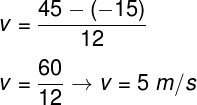
결과는 모바일이 이동 함을 나타냅니다. 매초 5 미터.
비) 이 무브먼트의 시간별 기능을 확인하려면 초기 위치와 속도 만 확인하면됩니다. 그런 다음 이러한 값을 위치의 시간별 함수로 대체합니다.

운동 데이터를 대체하면 다음과 같은 시간별 위치 기능이 있습니다.

씨) 시간별 위치 함수를 사용하여 언급 된 각 시간에 대해 로버의 위치를 계산해 보겠습니다.
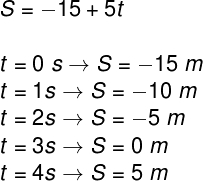
이 움직임의 그래프는 다음과 같습니다.
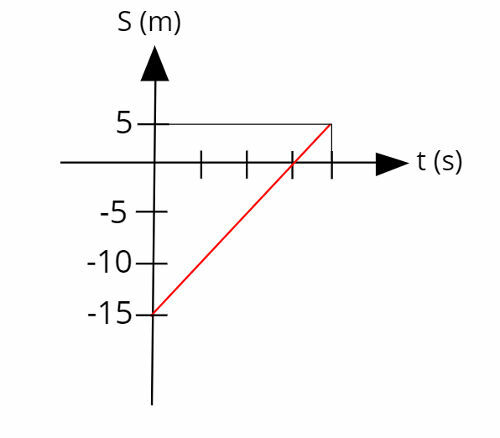
디) 그래프를 분석하면 모바일이 t = 0 s와 t = 3 s 사이의 기준에 접근하는 것을 볼 수 있습니다. 3 초 이후부터 모바일이 멀어지기 시작합니다. 따라서 움직임은 0과 3 초 사이에서 역행하고 3 초 앞쪽으로 점진적으로 진행됩니다.
나. Rafael Helerbrock