
O 移動ユニフォーム 家具が入ってきたときに発生します 直線 と 速度絶え間ない。 均一な動きで、モバイルは移動します スペース等しい に 休憩等しい時間の。
も参照してください: キネマティクス入門
次の状況を想像してみてください。 移動ユニフォーム、の速度で 20km / h、の初期位置から移動します 10km、の期間内 0,5H (30分)。 1時間以内に、この同じ車両は最初の位置から離れて移動します 20km.
全ての 動きユニフォームしなければならない発生することがにラインまっすぐ、 このタイプの動きで 存在しない 加速度. 理解する:家具の進行方向が変わるには、次のことが必要です。 力 印刷することによってそれに基づいて行動する 加速度 モバイルゲインを新しい速度成分にします。
均一なモーションフォーミュラ
均一な動きを説明し、その各変数の意味を理解するために使用されるいくつかの式を確認してください。

S- 家具の終了位置
s0 —モバイルホームポジション
v —モバイル速度
t - 時間間隔

v — 平均速度
S —変位
t - 時間間隔
ムーブメントの参照と分類
体の動きを正しく定義するには、参照フレームを選択する必要があります。 物理学では、参照は観察者が自分自身を見つける位置であると理解しています。 下の図は、水平方向に沿ってさまざまな方向に移動するいくつかの車両を示しています。
図で採用されている基準系(点0でマーク)は、観察者がいる場所です。 この参考文献によると、左側の車は 位置負、 右側の車が入っている間 位置ポジティブ。

参照は、動きの方向を示します。
それを認識することが重要です 別の参照を選択すると、各車両の初期位置とその動きの分類が変更されることになります。. 次の図は、選択したフレームワークが認識するものを示しています。 左側のオレンジ色の車と銀色の車が離れ、右側の銀色の車が近づいています。.
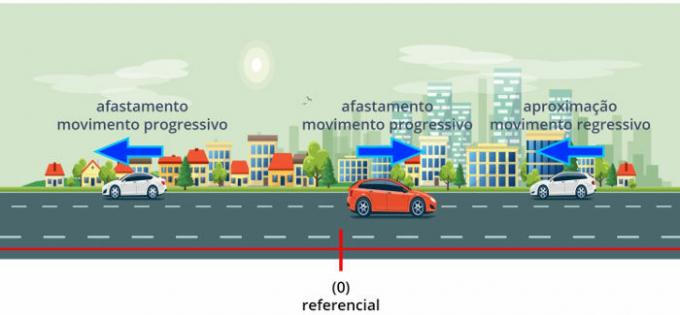
家具が基準座標系に近づくと、その動きは次のようになります。 逆進. モバイルがその基準から離れる場合、その動きは プログレッシブ. さらに、私たちは 移動プログレッシブ O 信号ポジティブ スピードのために。 にとって 逆進運動、 私たちは使用します 信号負、 モバイルとその参照の間の距離が減少します 時間とともに。
プログレッシブおよびレトログラードモーションビデオクラス
平均速度
ローバーの平均速度は、移動が発生した時間間隔での変位比(ΔS)によって与えられます。 次に、変位(ΔS)は、 位置最後の そして 初期 家具の。

v — 平均速度
S —変位
t - 時間間隔
平均速度の式では、ΔSを 変位。 家具の変位は、それがどこから来たのかがわかれば簡単に計算できます(S0 —開始位置)と彼が到着した場所(Sf -終了位置)移動の終了時。これは、 ブレークに時間 (Δt)、 瞬間最後の そして 初期 (Δt= tf – t0). この式の詳細については、以下をご覧ください。

速度測定単位
によると、速度の測定単位 国際単位系(SI)、 そしてその 地下鉄あたり2番目 (MS)。 ただし、他にも一般的な単位があります。 キロメートルあたり時間 (km / h)。 メートル/秒をキロメートル/時に変換するのは簡単です。 それをするために、ただ かける または 分割する係数3.6による速度係数、次の図に示すように:

例:
72 km / h / 3,6 = 20 MS
108 km / h /3,6 = 30 MS
マインドマップ:均一な動き
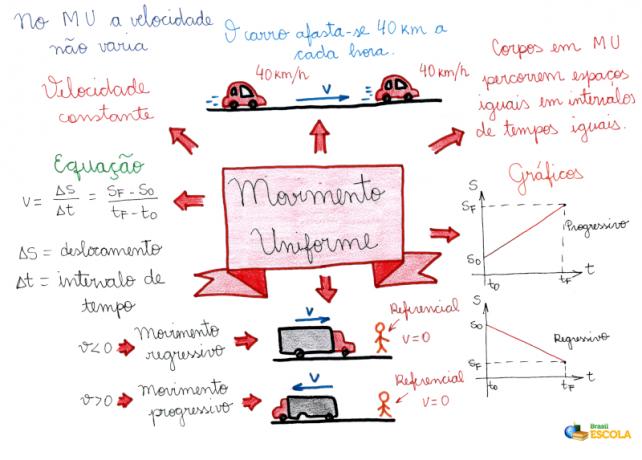
*マインドマップをPDFでダウンロードするには、 ここをクリック!
ユニフォームモーショングラフィックス
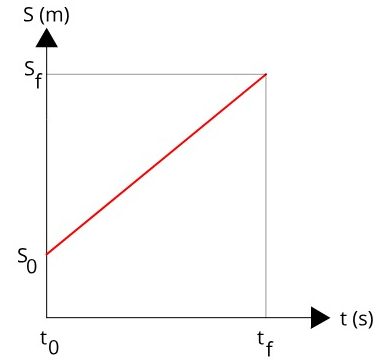
私たちは関係することができます 時間の関数としての家具の位置 グラフィックを使用します。 スムーズな動きのために、位置と時間のグラフは、次のように傾斜した直線を形成します。 アップ またはに 低、 動きに関連する プログレッシブ そして 逆進的、 それぞれ。 の位置と時間のグラフの例を参照してください。 移動ユニフォームプログレッシブ:
見てまた:力と動き
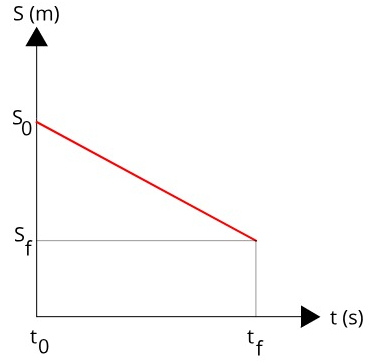
次の図には、を実行するモバイルの時間の関数としての位置を表すグラフがあります。 移動ユニフォーム そして 逆進 (または逆行)。
位置と時間のグラフを使用して、 速度 動きの。 このため、モバイルの速度はその接線、つまり、 襟付き反対 (ΔS)と 隣接する脚 直線(Δt)に。
次に、均一な動きの速度と時間のグラフはまっすぐです。 平行 モジュールの横軸に 負 または ポジティブ、 あなたの分類(プログレッシブまたはリグレッシブ)に応じて。 速度グラフを使用して、ローバーの変位を計算することができます。これを行うには、線の下の領域の係数を決定するだけです。
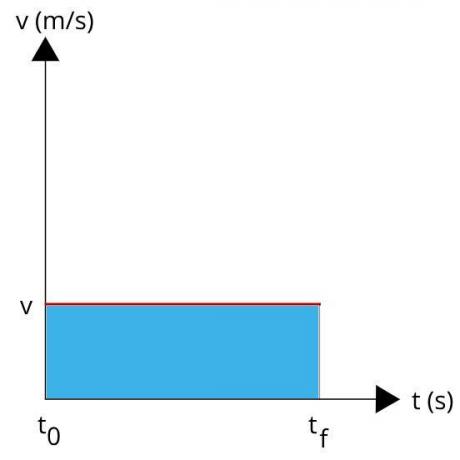
前のグラフでは、青く塗られた面積は数値的にaの面積と同じです 矩形。この面積は、次の式を使用して計算できます。

THE- 範囲
B —ベースエッジ
H - 高さ
見てまた: ユニフォームモーショングラフィックス
均等に変化する動き
O 移動均等にその他 それは、速度が時間とともに着実に増加または減少する動きです。 このタイプの動きは必ずしもまっすぐである必要はなく、 加速度 絶え間ない。 MUVについて詳しく知りたい場合は、 ここに.
見てまた: キネマティクスの演習を解決する方法は?
均一な動きの練習
1) モバイルは開始位置Sから開始します0 = -15 m、12秒後に位置SになりますF = 45メートル。
a)この携帯電話の平均速度を決定します。
b)ローバー位置の時間ごとの機能を決定します。
c)t = 0 s、t = 1 s、t = 2 s、t = 3 s、t = 4sの可動位置を計算します。 次に、その動きの位置と時間のグラフを作成します。
d)この家具によって説明される動きを評価します。
解決
) この動きの平均速度を計算するには、平均速度の式を使用します。

エクササイズステートメントによって提供されたデータを挿入して、次の計算を行います。
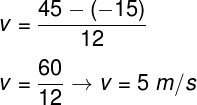
結果は、モバイルが動くことを示しています 毎秒5メートル.
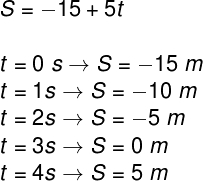
B) このムーブメントの1時間ごとの機能を決定するには、その初期位置と速度を特定する必要があります。 次に、これらの値をポジションの時間関数に代入します:

運動データを置き換えると、次の1時間ごとの位置関数があります。

ç) 毎時位置関数を使用して、言及された各時点のローバーの位置を計算してみましょう。
この動きのグラフを以下に示します。
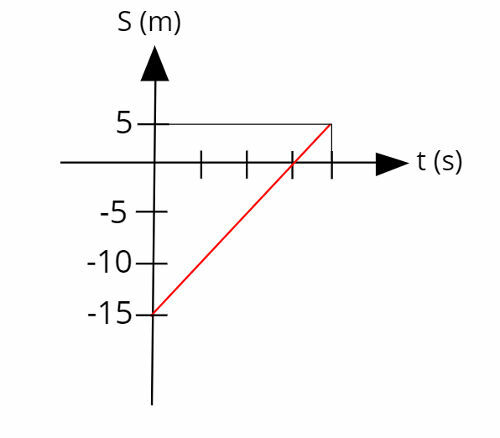
d) グラフを分析すると、モバイルがt = 0秒とt = 3秒の間の参照に近づき、3秒以降、モバイルが離れ始めていることがわかります。 したがって、動きは0〜3秒の間で逆行し、3秒先に進行します。
私によって。ラファエル・ヘラーブロック
ソース: ブラジルの学校- https://brasilescola.uol.com.br/fisica/movimento-uniforme.htm


