電力は、タスクが実行される速度、または特定の期間に実行されるタスクの数の尺度です。
物理学では、電力の概念は、これらのタスクを実行するために消費または供給されるエネルギーの量と、使用された時間に関連しています。
2台のマシンが同じジョブを実行し、そのうちの1台が半分の時間でそれを実行する場合、高速であるほど強力です。 2台のマシンが同じ時間動作し、そのうちの1台が2倍の時間を生成する場合、最も多く生成するマシンが最も強力です。
パワーは、作業とこの作業を実行するために使用される時間間隔の間の除算の結果であり、スカラー量です。つまり、方向と方向を定義する必要はありません。
平均電力式
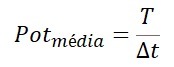
どこ:
T J(ジュール)で測定された仕事です。、秒単位で測定されます。
仕事量、つまり使用または供給されるエネルギーは一定期間にわたって変化する可能性があるため、上記の式は平均電力を示します。
パワーユニット
国際システム(SI)では、作業単位はジュール(J)であり、時間は秒(s)です。 そのため、電力の単位はJ / sです。これは非常に重要な指標であり、発明者、数学者、エンジニアであるジェームズワットに敬意を表して、特別な名前であるワット(W)が付けられました。 多くの人が産業革命の先駆者であると考えていたジェームズ・ワットは、他の多くの貢献に加えて、蒸気エンジンを完成させ、後に彼自身のエンジンの特許を取得しました。
ジェームズワットによって開発された別の概念は、HP(馬力)またはCV(馬力)でした。
電気エネルギー供給で一般的に使用される複数のkW(1,000 W)やMW(1,000,000 W)など、電力を表す他の方法に出くわすのはよくあることです。
フィートポンド秒では、1ワットは次のように表されます。
変位における一定の力の力
効力は次のように表されます。
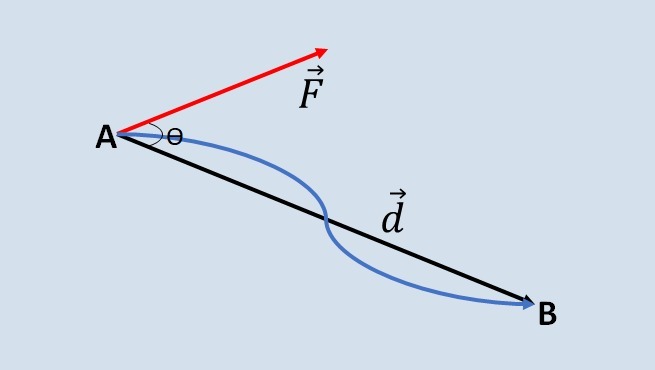
力Fは、物体に対して作業を実行し、物体を点Aから点Bに移動します。 体を動かすときに力Fによって実行される仕事は、次のように計算できます。
どこ:
Fは一定の力であり、ニュートン(N)で測定されます。
dは、メートル(m)で測定された変位です。
cosθは角度θの余弦です。 (力と運動の方向の間に形成される角度)
平均速度の関数としての力の力
平均速度は、変位を時間で割ったものであるため、次の関係に従います。
作品の前の方程式を代入すると、次のようになります。
瞬時電力
パワーは、作業とその作業の実行に使用された時間を分割した結果です。 ゼロに向かう傾向がある非常に短い時間間隔を取る場合、私たちは瞬間的な力を持っています。
どこ、 分割が行われることを意味します
分割が行われることを意味します  ゼロに非常に近い。
ゼロに非常に近い。
パフォーマンス
機械または装置の効率は、実際に使用された電力とそれが受け取った電力の比率です。 この有効電力は使用可能な部分であり、受け取った電力から消費した電力を差し引いたものです。
ある量の電力を受け取るデバイスまたは機械は、それを完全に仕事に変えることができず、熱、ノイズ、およびその他のプロセスの形で、摩擦のために部品が失われます。
Potu = Potr-ポット
どこ:
ポツ それは有用な力です。
子馬 受信電力です。
ポット 消費電力です。
収入の公式
どこ、 収入です。
収入です。
ポツ それは有用な力です。
子馬 は受信電力です。
歩留まりを表す別の方法は、歩留まりの代わりに有用な力の表現を使用することです。

収率は常に100%未満です。 これが発生する理由を理解するには、式で、分子にある有効電力が常に消費電力であるため、受信電力よりも常に小さいことを確認する必要があります。
同じ単位の数量間の除算であるため、除算でキャンセルされるため、歩留まりには測定単位がありません。 それは無次元量であり、パーセンテージで表すのが一般的です。
歩留まりのアイデアは、電気、熱、機械の機械に拡張できます。
パフォーマンスの詳細 カルノーサイクル.
演習
質問1
注文した車のドックを輸送して積み込む船。 車両はコンテナに入っており、それぞれの質量は約4000kgです。 それらを港から船の甲板に移動するために、クレーンがそれらを30mの高さまで持ち上げます。 コンテナを持ち上げる各操作は5分続きます。
このタスクを実行するためにクレーンが使用する電力を計算します。 10m /s²に等しい重力加速度gを考えてみましょう。
解決:
平均電力は仕事を時間で割ったものであり、時間はすでに問題によって提供されているため、仕事を決定する必要があります。
データ:
m = 4000 kg
高さ= 30 m
t = 5分= 5 x60秒= 300秒
g = 10m /s²。
クレーン作業は重量力で行います。
したがって、
使用電力は4kWになります。
質問2
道路では、車は40 m / sの一定速度で移動します。 この動きを実行するには、速度と同じ方向に一定の水平方向の力を加えます。 エンジンは80kWの出力を生成します。 加えられた力の強さはどれくらいですか?
解決:
パワーやスピードとの関係で強さを判断できます。
データ:
Vm = 40 m / s
ポット= 80 kW
一定の力の力は、速度とそれらの間に形成される角度の余弦による力の積によって与えられます。 この場合、力と速度は同じ方向と方向にあるため、角度θはゼロで余弦は1です。
ポット= F。 来て。 cosθ
ポット= F.Vm。 cos 0
ポット= F。 来て。 1
Fを分離し、値を置き換えると、
加えられる力の強さは20kNになります。
質問3
(Fuvest-SP)。 コンベヤーベルトは、地下倉庫から1階に毎分15ケースの飲料を輸送します。 トレッドミルの長さは12m、水平から30度の傾斜で、一定の速度で移動します。 輸送される箱は、コンベヤーの速度ですでに配置されています。 各ボックスの重量が200Nの場合、このメカニズムを駆動するモーターは次の電力を提供する必要があります。
a)20W
b)40W
c)300W
d)600W
e)1800W
解決:
電力は、作業と使用時間の関係(秒単位)によって与えられます。
データ:
t = 1分= 60秒
ベルトの長さ= 12 m
傾斜= 30°
P = 1箱あたり200N
15個のボックスでは、200 N x 15 = 3000Nになります。
したがって、P = 3000 N、したがってmg = 3000Nです。
重力の仕事はT = m.g.hで与えられるので、高さを決定する必要があります。
高さhで、マットは水平に対して30度の直角三角形を形成します。 したがって、hを決定するには、30ºの正弦を使用します。
三角法から、正弦30°= 1/2であることがわかります。
仕事はによって与えられます:
効力を判断するには、作業を時間で割るだけです。
したがって、答えは文字cです。
興味を持ってくれたあなた:
電力
仕事とエネルギー
物理式