
残高静的 の結果が 力 と力のモーメントの合計、または トルク、はnullです。 静的平衡状態にあるとき、体は静止しています。 全体として、2つの3つの異なるタイプのバランスがあります。 安定している, 不安定 そして 無関心。
見てまた: ニュートンの法則について知っておくべきことすべて
静的および動的バランス
始める前に、この記事を理解するためにいくつかの概念が基本的に重要です。それらを確認してください。
- 力結果: を通じて計算されます ニュートンの第2法則. 平衡状態では、 ベクトル和 これらの力のうち、ゼロでなければなりません。
- トルクまたは力のモーメント: これは、回転の動的エージェントに関係します。つまり、ゼロ以外のトルクがボディに適用されると、回転運動を表す傾向があります。
私たちは 残高 伸ばされた、または時間厳守の身体が正味の合力を受ける状況。 このように、そしてによって確立されたものに従って ニュートンの第1法則、慣性の法則として知られている、 バランスの取れた体は、安静時または安静時のいずれかになります 均一な直線運動 —それぞれ静的平衡および動的平衡と呼ばれる状況。
静的均衡の種類
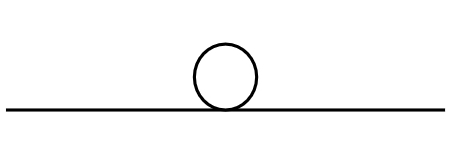
- 不安定なバランス: 物体が平衡位置から少し変位すると、どんなに小さくても、その位置からどんどん離れていく傾向があります。 下の図を見てください。

- 安定したバランス: この図に示すように、バランスの取れた位置から移動した物体が初期位置に戻る傾向がある場合:

- 残高無関心:体の位置に関係なく、体のバランスが保たれている場合は、以下を確認してください。
もっと知る: サッカーボールが空中でどのように曲がるかを発見する
マテリアルポイントのバランスと拡張ボディのバランス
たとえば、小さな粒子の場合のように、物体の寸法を無視できる場合は、 残高のスコア材料。 これらの場合、体のバランスをとるには、体に作用する力の合計がゼロで十分です。
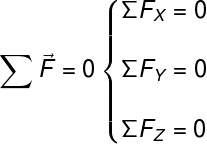
F - 力
Fバツ –力のx成分
Fy –力のy成分
した –力のz成分
この図は、力の合計と各方向の力の成分の合計がゼロに等しくなければならないことを示しています。そのため、点対称体は静的平衡状態にあります。
バー、跳ね橋、サポート、レバー、ギア、その他の巨視的な物体の場合のように、体の寸法を無視できない場合は、 残高の体広範囲。 このタイプのバランスを正しく定義するには、力の作用点からこれらの回転軸までの距離を考慮する必要があります。 言い換えると、静的または動的平衡の条件では、力で発生するように、トルク(またはモーメント)の合計がヌルである必要があります。 適用されます。
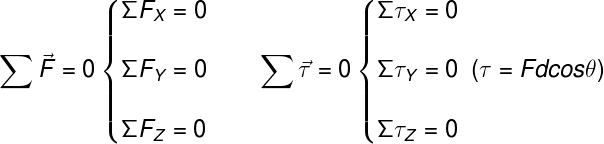
上記の条件は、伸ばされた物体の場合、力とトルクの合計が各方向でゼロである必要があることを示しています。

静的バランスに関する解決済みの演習
静的バランスの練習を解くには、合計の基本的な知識が必要です。 ベクター そして ベクトル分解.
アクセスまた: 困っていますか? ニュートンの法則を使用して演習を解決する方法を学ぶ
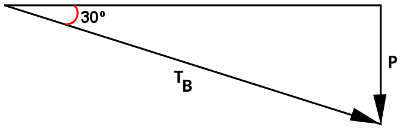
質問1)(イスル) 下の図に示すように、重量が300 NのボックスAは、2本のロープBとCで吊り下げられています。 (データ:sin30º= 0.5)

文字列Bのプルの値は次のとおりです。
a)150.0 N
b)259.8 N
c)346.4 N
d)600.0 N
フィードバック:文字D
解決:
この演習を解決するには、 三角法、文字列Bのプルを計算するため。 このためには、正弦の定義を使用する必要があります。これは、弦の間に形成される角度が 30º、正弦式は、反対側と 斜辺。 次の図を参照してください。その中で、ベクトルTで三角形を形成します。B (ロープBを引っ張る)と重量(P):
これに基づいて、次の計算を行う必要があります。
質問2)(スペック) 次の図に示すように、質量m = 24 kgのブロックは、拡張不可能で無視できる質量のLおよびQストリングによってバランスが保たれています。 ロープLは壁と90°の角度を形成し、ロープQは天井と37°の角度を形成します。 重力による加速度が10m /s²に等しいことを考慮すると、ロープLが壁に及ぼす牽引力の値は次のようになります。
(データ:cos37°= 0.8およびsin37°= 0.6)

a)144 N
b)180 N
c)192 N
d)240 N
e)320 N
フィードバック:文字e
解決:
まず、Qケーブルでサポートされている牽引力の値を決定する必要があります。そのために、前の演習と同様に、正弦比を使用します。

ワイヤーQの張力を見つけたら、ケーブルLによって加えられた張力によって相殺されるこの張力の成分を計算する必要があります。 ここで、角度の余弦を使用します。これは、Qケーブルのプルの水平成分が37°の角度に隣接する側であるためです。注:

質問3) (uerj) 質量が80kgの男性は、長さ2.0 mの硬い板の上で休息し、バランスを取ります。その質量は男性よりもはるかに小さくなっています。 ボードは、両端の2つのサポートAとBに水平に配置され、男性はAでサポートされている端から0.2mの位置にあります。 ボードがサポートAに及ぼす力の強さ(ニュートン単位)は、次の値と同等です。
a)200
b)360
c)400
d)720
フィードバック:文字D
解決:
演習をより簡単に表示できるように図を作成しました。確認してください。

男性が支えられているバーは広大なボディであるため、両方を考慮に入れる必要があります 和の力 について 和ベクターからトルク それに基づいて行動します。 したがって、次の計算を行う必要があります。

これらの計算を行うには、最初に、トルクの合計がゼロに等しくなければならないという条件を使用します。 次に、力にロッドの回転軸からの距離を掛けます(この場合、位置Aを選択します)。 信号を決定するために、 信号ポジティブ で回転を生成するトルクの場合 センス反時計回り、信号が 負 でバーを回転させる傾向がある重量力によって生成されるトルクに使用されました センススケジュール。
トルクの合力の計算はNになりましたB = 80 Nの場合、2番目の平衡条件を使用します。 この場合、バーに作用する力の合計はゼロでなければならないと言い、点Aで次のような通常の反力が得られます。 720N.
RafaelHellerbrock著
物理の先生
ソース: ブラジルの学校- https://brasilescola.uol.com.br/fisica/equilibrio-estatico.htm
