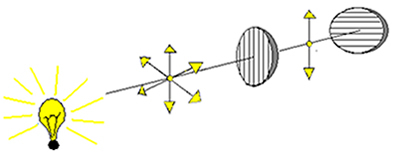
वेक्टर वह प्रतिनिधित्व है जो एक वेक्टर मात्रा के परिमाण, दिशा और दिशा को निर्धारित करता है। सदिश एक छोर पर एक तीर द्वारा उन्मुख सीधे खंड होते हैं।
हम वैक्टर को एक अक्षर और एक छोटे तीर के साथ नाम देते हैं।
सदिश सदिश राशियों की विशेषता है, जो ऐसी मात्राएँ हैं जिन्हें अभिविन्यास की आवश्यकता होती है, अर्थात दिशा और दिशा। कुछ उदाहरण हैं: बल, वेग, त्वरण और विस्थापन। संख्यात्मक मान पर्याप्त नहीं है, यह वर्णन करना आवश्यक है कि ये मात्राएँ कहाँ कार्य करती हैं।
वेक्टर का मापांक
वेक्टर का मापांक, या तीव्रता, इसका संख्यात्मक मान है, इसके बाद परिमाण की माप की इकाई जो इसका प्रतिनिधित्व करती है, उदाहरण के लिए:
हम बार के बीच मॉड्यूल को इंगित करते हैं तीर या, केवल अक्षर, बिना सलाखों और बिना तीर के।
वेक्टर की लंबाई मापांक के समानुपाती होती है। एक बड़ा वेक्टर एक बड़े मापांक का प्रतिनिधित्व करता है।
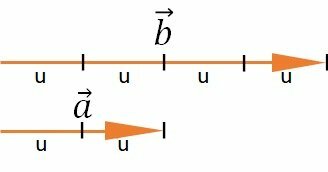
वेक्टर मॉड्यूल 4 इकाइयाँ हैं, जबकि वेक्टर
2 इकाई है।
एक वेक्टर की दिशा
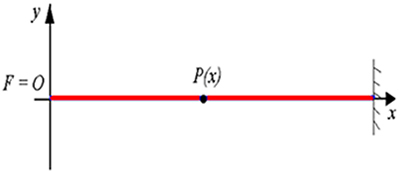
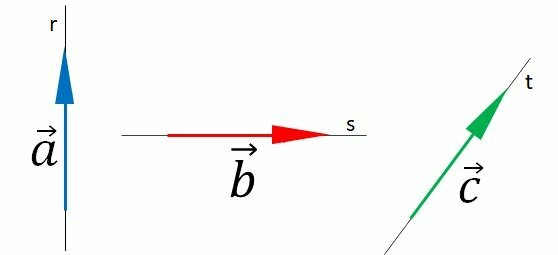
वेक्टर की दिशा समर्थन रेखा का ढलान है जिस पर इसे निर्धारित किया जाता है। प्रत्येक वेक्टर के लिए केवल एक दिशा होती है।
एक वेक्टर की भावना
वेक्टर की दिशा तीर द्वारा दिखाई जाती है। एक ही दिशा में दो दिशाएँ हो सकती हैं, जैसे ऊपर या नीचे और बाएँ या दाएँ।
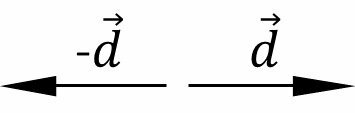
एक दिशा को सकारात्मक के रूप में अपनाने से, विपरीत दिशा, नकारात्मक, को वेक्टर प्रतीक से पहले एक ऋण चिह्न के साथ दर्शाया जाता है।
परिणामी वेक्टर
परिणामी वेक्टर वेक्टर संचालन का परिणाम है और वैक्टर के एक सेट के बराबर है। वेक्टर को जानना सुविधाजनक है जो एक से अधिक वेक्टर द्वारा उत्पादित प्रभाव का प्रतिनिधित्व करता है।
उदाहरण के लिए, एक पिंड बलों के एक समूह के अधीन हो सकता है और हम यह जानना चाहते हैं कि वे इस शरीर पर कुल मिलाकर क्या परिणाम उत्पन्न करेंगे। प्रत्येक बल एक वेक्टर द्वारा दर्शाया जाता है, लेकिन परिणाम केवल एक वेक्टर द्वारा दर्शाया जा सकता है: परिणामी वेक्टर।

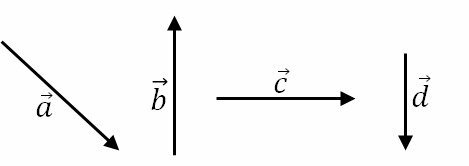
परिणामी वेक्टर, , क्षैतिज दिशा और दाईं ओर दिशा, वैक्टर के जोड़ और घटाव का परिणाम है।
,
,
तथा
. परिणामी वेक्टर शरीर के इस अभिविन्यास में आगे बढ़ने की प्रवृत्ति को दर्शाता है।
ऊर्ध्वाधर दिशा वाले वैक्टर का आकार समान होता है, अर्थात समान मॉड्यूल। जैसा कि उनके विपरीत अर्थ हैं, वे एक दूसरे को रद्द कर देते हैं। इससे पता चलता है कि ऊर्ध्वाधर दिशा में टोकरा की कोई गति नहीं होगी।
वैक्टर का विश्लेषण करते समय तथा
, जिनकी दिशा और विपरीत दिशाएं समान हैं, हम महसूस करते हैं कि बल का एक हिस्सा सदिश के रूप में दाईं ओर "रहता है"
से बड़ा है
, वह है, का मॉड्यूल
यह बड़ा है।
परिणामी वेक्टर को निर्धारित करने के लिए, हम वेक्टर जोड़ और घटाव संचालन करते हैं।
एक ही दिशा वाले सदिशों का जोड़ और घटाव
साथ में समान इंद्रियां, हम मॉड्यूल जोड़ते हैं और दिशा और दिशा रखते हैं।
उदाहरण:
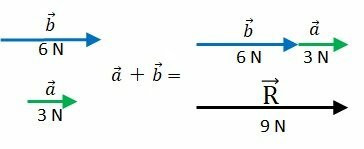
ग्राफिक रूप से हम वैक्टर को उनके मॉड्यूल को बदले बिना क्रम में रखते हैं। एक की शुरुआत दूसरे के अंत के साथ मेल खाना चाहिए।
जोड़ का क्रमविनिमेय गुण मान्य है, क्योंकि आदेश परिणाम को नहीं बदलता है।
साथ में विपरीत इंद्रियां, हम मॉड्यूल घटाते हैं और दिशा रखते हैं। परिणामी वेक्टर की दिशा सबसे बड़े मापांक वाले वेक्टर की होती है।
उदाहरण: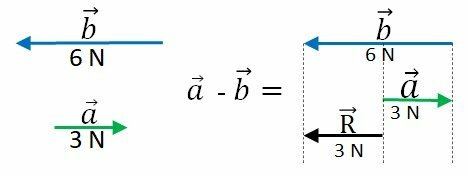
वेक्टर का बचा हुआ हिस्सा है
, वापस लेने के बाद
.
एक वेक्टर को घटाना दूसरे के विपरीत के साथ जोड़ने के बराबर है।
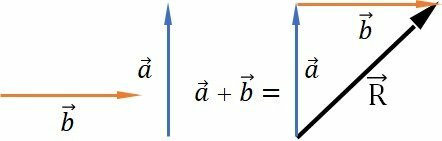
लंब सदिशों का जोड़ और घटाव
लंबवत दिशाओं के साथ दो वैक्टर जोड़ने के लिए, हम वैक्टर को उनके मापांक को बदले बिना स्थानांतरित करते हैं, ताकि एक की शुरुआत दूसरे के अंत के साथ मेल खाए।
परिणामी वेक्टर पहले की शुरुआत को दूसरे के अंत से जोड़ता है।
दो लंबवत वैक्टरों के बीच परिणामी वेक्टर का परिमाण निर्धारित करने के लिए, हम दो वैक्टरों की शुरुआत से मेल खाते हैं।
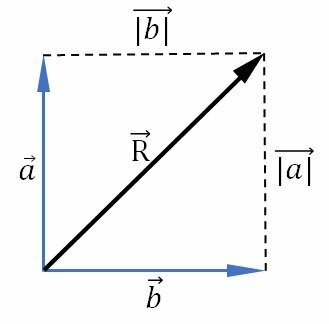
परिणामी वेक्टर का मापांक पाइथागोरस प्रमेय द्वारा निर्धारित किया जाता है।
परोक्ष सदिशों का जोड़ और घटाव
दो सदिश तिरछे होते हैं जब वे 0°, 90° और 180° के अलावा अन्य दिशाओं के बीच एक कोण बनाते हैं। तिरछे सदिशों को जोड़ने या घटाने के लिए, समांतर चतुर्भुज और बहुभुज रेखा विधियों का उपयोग किया जाता है।
समांतर चतुर्भुज विधि
दो सदिशों के बीच समांतर चतुर्भुज की विधि, या नियम का पालन करने और परिणामी सदिश बनाने के लिए, हम इन चरणों का पालन करते हैं:
पहला कदम उनके मूल को एक ही बिंदु पर रखना है और एक समांतर चतुर्भुज बनाने के लिए वैक्टर के समानांतर रेखाएं खींचना है।
दूसरा, समांतर चतुर्भुज पर, सदिशों के मिलन और समानांतर रेखाओं के मिलन के बीच एक विकर्ण सदिश खींचना है।

बिंदीदार रेखाएँ सदिशों के समानांतर होती हैं और बनने वाली ज्यामितीय आकृति एक समांतर चतुर्भुज होती है।
परिणामी वेक्टर वह रेखा है जो वैक्टर की उत्पत्ति को समानांतर से जोड़ती है।
हे परिणामी वेक्टर का मापांक कोसाइन कानून द्वारा प्राप्त किया जाता है।
कहा पे:
R परिणामी सदिश का परिमाण है;
ए वेक्टर मॉड्यूल है ;
b वेक्टर का मापांक है ;
सदिशों की दिशाओं के बीच बनने वाला कोण है।
समांतर चतुर्भुज विधि का उपयोग वैक्टर की एक जोड़ी जोड़ने के लिए किया जाता है। यदि आप दो से अधिक वैक्टर जोड़ना चाहते हैं, तो आपको उन्हें दो-दो करके जोड़ना होगा। पहले दो के योग के परिणामस्वरूप वेक्टर में, हम तीसरे और इसी तरह जोड़ते हैं।
दो से अधिक वैक्टर जोड़ने का दूसरा तरीका बहुभुज लाइन विधि का उपयोग करना है।
बहुभुज रेखा विधि
बहुभुज रेखा पद्धति का उपयोग सदिशों को जोड़ने के परिणामस्वरूप सदिश को खोजने के लिए किया जाता है। दो से अधिक वैक्टर जोड़ते समय यह विधि विशेष रूप से उपयोगी होती है, जैसे कि निम्नलिखित वैक्टर ,
,
तथा
.
इस पद्धति का उपयोग करने के लिए हमें सदिशों को क्रमबद्ध करना चाहिए ताकि एक (तीर) का अंत दूसरे की शुरुआत के साथ मेल खाता हो। मॉड्यूल, दिशा और दिशा को संरक्षित करना महत्वपूर्ण है।
सभी सदिशों को बहुभुज रेखा के रूप में व्यवस्थित करने के बाद, हमें परिणामी सदिश का पता लगाना चाहिए जो पहले की शुरुआत से अंतिम के अंत तक जाता है।
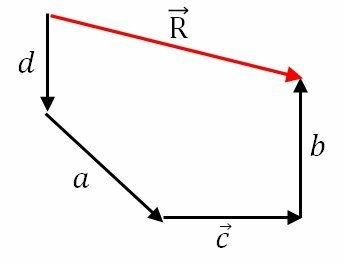
यह महत्वपूर्ण है कि परिणामी वेक्टर बहुभुज को बंद कर देता है, जिसका तीर अंतिम वेक्टर में तीर के साथ मेल खाता है।
कम्यूटेटिव प्रॉपर्टी मान्य है, क्योंकि जिस क्रम में हम प्लॉट-वेक्टर रखते हैं, वह परिणामी वेक्टर को नहीं बदलता है।
वेक्टर अपघटन
एक वेक्टर को विघटित करना उन घटकों को लिखना है जो इस वेक्टर को बनाते हैं। ये घटक अन्य वैक्टर हैं।
प्रत्येक वेक्टर को वेक्टर योग के माध्यम से अन्य वैक्टरों की संरचना के रूप में लिखा जा सकता है। दूसरे शब्दों में, हम एक वेक्टर को दो सदिशों के योग के रूप में लिख सकते हैं, जिसे हम घटक कहते हैं।
लंबवत x और y अक्षों के साथ एक कार्टेशियन समन्वय प्रणाली का उपयोग करके, हम वेक्टर के घटकों को निर्धारित करते हैं।
वेक्टर घटक वैक्टर के बीच वेक्टर योग का परिणाम है।
तथा
.
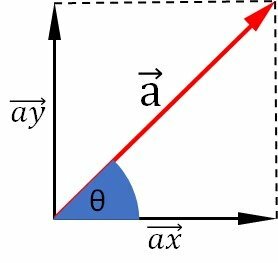
वेक्टर नत
x अक्ष के साथ एक समकोण त्रिभुज बनाता है। इस प्रकार, हम त्रिकोणमिति का उपयोग करके घटक वैक्टर के मॉड्यूल निर्धारित करते हैं।
घटक मॉड्यूल कुल्हाड़ी।
घटक मॉड्यूल ए.
वेक्टर मॉड्यूल पाइथागोरस प्रमेय से प्राप्त होता है।
उदाहरण
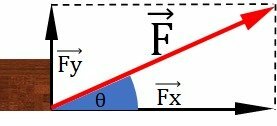
जमीन से एक ब्लॉक खींचकर एक बल का प्रदर्शन किया जाता है। 50 N मापांक बल क्षैतिज से 30° झुका हुआ है। इस बल के क्षैतिज और ऊर्ध्वाधर घटकों का निर्धारण करें।
आंकड़े:
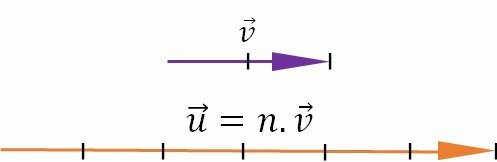
एक सदिश द्वारा वास्तविक संख्या का गुणन
एक वास्तविक संख्या को एक सदिश से गुणा करने पर, परिणाम एक नया सदिश होगा, जिसमें निम्नलिखित विशेषताएं होंगी:
- वही दिशा यदि वास्तविक संख्या शून्येतर है;
- वही दिशा, यदि वास्तविक संख्या धनात्मक है, और विपरीत दिशा में यदि यह ऋणात्मक है;
- मापांक वास्तविक संख्या के मापांक और गुणा सदिश के मापांक का गुणनफल होगा।
एक वास्तविक संख्या और एक वेक्टर के बीच उत्पाद
कहा पे: गुणन से उत्पन्न सदिश है;
वास्तविक संख्या है;
वेक्टर गुणा किया जा रहा है।
उदाहरण
माना वास्तविक संख्या n = 3 और सदिश मॉड्यूल 2 का, उनके बीच का उत्पाद बराबर है:
मॉड्यूल गणना
दिशा और दिशा समान होगी।
अभ्यास 1
(एनेम 2011) घर्षण बल एक बल है जो निकायों के बीच संपर्क पर निर्भर करता है। इसे निकायों की विस्थापन प्रवृत्ति के विरोधी बल के रूप में परिभाषित किया जा सकता है और संपर्क में दो सतहों के बीच अनियमितताओं के कारण उत्पन्न होता है। आकृति में, तीर शरीर पर कार्य करने वाले बलों का प्रतिनिधित्व करते हैं और बढ़े हुए बिंदु दो सतहों के बीच मौजूद अनियमितताओं का प्रतिनिधित्व करते हैं।

चित्र में, वे सदिश जो विस्थापन और घर्षण का कारण बनने वाले बलों का प्रतिनिधित्व करते हैं, क्रमशः हैं:
NS) 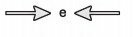
बी) 
सी) 
डी) 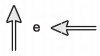
तथा) 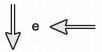
सही उत्तर: पत्र ए) 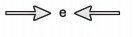
तीर बलों के वैक्टर का प्रतिनिधित्व करते हैं जो क्षैतिज दिशा में आंदोलन में कार्य करते हैं, एक क्रिया-प्रतिक्रिया जोड़ी होने के कारण, उनके विपरीत दिशाएं होती हैं।
ऊर्ध्वाधर तीर भार बल और सामान्य बल की क्रियाओं का प्रतिनिधित्व करते हैं और, जैसा कि वे समान हैं, वे एक दूसरे को रद्द कर देते हैं, ऊर्ध्वाधर दिशा में कोई गति नहीं होती है।
व्यायाम 2
(यूईएफएस 2011) आकृति में वेक्टर आरेख ऑर्थोडोंटिक उपचार से गुजर रहे व्यक्ति के दांत पर दो रबर बैंड द्वारा लगाए गए बलों को रेखांकित करता है।
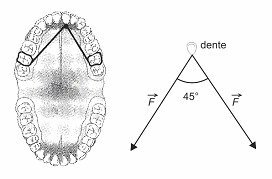
मान लें कि F = 10.0N, sen45° = 0.7 और cos45° = 0.7, दांत पर इलास्टिक्स द्वारा N में लगाए गए बल की तीव्रता के बराबर है
क) 3√10
बी) 2√30
ग) 2√85
घ) 3√35
ई) 2√45
सही उत्तर: सी) 2√85
दांत पर लगाए गए बल की तीव्रता कोसाइन के नियम द्वारा प्राप्त की जाती है।
ए और बी 10 एन के बराबर हैं।
वर्गमूल का गुणनखंड करना हमें देता है:
इसलिए, दाँत पर रबर बैंड द्वारा लगाए गए परिणामी बल की तीव्रता है .
व्यायाम 3
(PUC RJ 2016) चित्र में F1, F2, F3 और F4 को एक दूसरे से समकोण बनाते हैं और उनके मॉड्यूल क्रमशः 1 N, 2 N, 3 N और 4 N हैं।
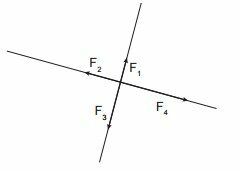
एन में शुद्ध बल के मापांक की गणना करें।
ए) 0
बी) 2
ग) 2
घ) 2√ 2
ई) 10
सही उत्तर: डी) 2√ 2
हम परिणामी वेक्टर को निर्धारित करने के लिए बहुभुज रेखा पद्धति का उपयोग करते हैं। ऐसा करने के लिए, हम वैक्टर को पुनर्व्यवस्थित करते हैं ताकि एक का अंत दूसरे की शुरुआत के साथ मेल खाता हो, जैसे:
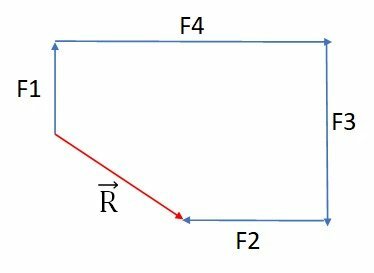
परिणामी वेक्टर की शुरुआत में मूल के साथ एक समन्वय प्रणाली का उपयोग करके, हम इसके घटकों के मॉड्यूल को निम्नानुसार निर्धारित कर सकते हैं:
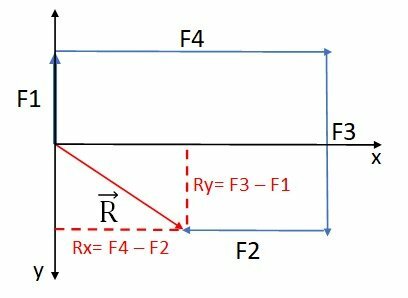
इस प्रकार, हमें यह करना होगा:
रय = 3 - 1 = 2 एन
आरएक्स = 4 - 2 = 2 एन
परिणामी वेक्टर का परिमाण पाइथागोरस प्रमेय द्वारा निर्धारित किया जाता है।
इसलिए, नेट बल का मापांक बराबर है .
के बारे में अधिक जानने
- वैक्टर: जोड़, घटाव और अपघटन।
- वेक्टर मात्रा
✖