
O liikumineühtlane tekib siis, kui mõni mööbliese sisse kolib sirgjoon ja koos kiiruspidev. Ühtlases liikumises mobiil liigub tühikudvõrdub aastal vaheajadvõrdse ajaga.
Vaadake ka: Kinemaatika sissejuhatus
Kujutage ette järgmist olukorda: sõiduk, mis liigub sisse liikumineühtlane, kiirusega 20km / hon kolinud oma algsest positsioonist aastal 10km, aja jooksul 0,5H (30 minutit). 1 tunni pärast on see sama sõiduk eemal oma algsest asendist 20km.
Kõik liigutusedvormiriietuspeabilmnemaaastalridasirge, kuna seda tüüpi liikumises Pole kiirendus. Mõistke: selleks, et mööblieseme liikumissuund muutuks, on vaja, et a tugevus tegutseda sellele trükkides a kiirendus ja mobiiltelefoni võimendamise muutmine uueks kiiruskomponendiks.
Ühtsed liikumisvalemid
Vaadake mõnda valemit, mida kasutatakse ühtse liikumise kirjeldamiseks, ja mõistke iga selle muutuja tähendust:

S - mööbli lõppasend
s0 - liikuv koduasend
v - mobiilne kiirus
t - ajavahemik

v - keskmine kiirus
S - nihkumine
t - ajavahemik
Viited ja liigituse liigitus
Keha liikumise õigeks määratlemiseks on vaja valida võrdlusraam. Füüsikas mõistame, et referents on positsioon, kuhu vaatleja satub. Alloleval joonisel on kujutatud mõned sõidukid, mis liiguvad horisontaalsuunas erinevates suundades.
Joonisel võetud võrdlusraam (tähistatud punktiga 0) on vaatleja asukoht. Selle viite kohaselt on vasakpoolsed autod sees positsioonidnegatiivne, samal ajal kui parempoolsed autod on sees positsioonidpositiivne.

Referents näitab liikumiste suunda.
Oluline on sellest aru saada teise viite valimine tähendaks iga sõiduki algpositsioonide ja ka nende liikumiste klassifikatsiooni muutmist. Alloleval joonisel on näha, mida valitud raamistik tajub: vasakpoolne oranž ja hõbedane auto lähevad eemale, samal ajal kui paremal olev hõbedane auto läheneb sellele..
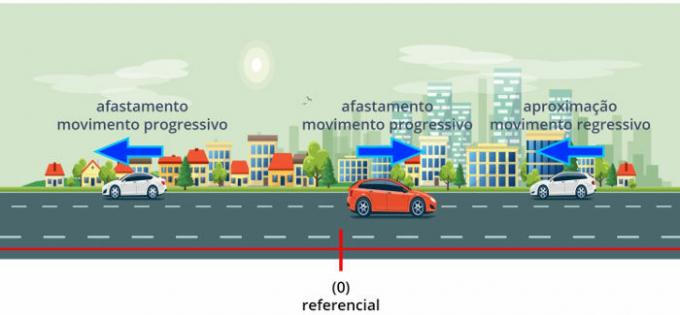
Me ütleme, et kui mööblieseme läheneb oma võrdlusraamile, on selle liikumine nii regressiivne. Kui mobiil eemaldub referentsist, on selle liikumine progressiivne. Lisaks omistame liikumineprogressiivne O signaalpositiivne kiiruse jaoks. Sest regressiivne liikumine, me kasutame signaalnegatiivne, mis näitab seda kaugus mobiiltelefoni ja selle referentsi vahel väheneb ajaga.
Progressiivne ja retrograadne liikumisvideoklass
Keskmine kiirus
Roveri keskmise kiiruse annab nihkesuhe (ΔS) ajavahemikus, milles liikumine toimus. Nihke (ΔS) annab omakorda erinevus positsioonidLõplik ja initsiaalne mööblist.

v - keskmine kiirus
S - nihkumine
t - ajavahemik
Keskmise kiiruse valemis nimetame chamaS of nihe. Mööblieseme nihke saab hõlpsasti arvutada, kui teame, kust see tuli (S0 - algasend) ja kuhu ta saabus (Sf —Lõpupositsioon) liikumise lõpus, mida piiritleb a murdaaastalaeg (Δt), arvutatud ajavahe järgi hetkiLõplik ja initsiaalne (Δt = tf - t0). Vaadake seda valemit üksikasjalikumalt allpool:

Kiiruse mõõtühikud
Kiiruse mõõtühik vastavalt Rahvusvaheline süsteem (SI), ja metrooperteine (Prl). Siiski on ka teisi ühiseid üksusi, näiteks kilomeeterpertund (km / h). Meetrit sekundis on lihtne teisendada kilomeetrit tunnis. seda teha lihtsalt korrutada või jagakiiruse moodul teguri järgi 3,6, nagu on näidatud järgmisel joonisel:

Näited:
72 km / h / 3,6 = 20 Prl
108 km / h /3,6 = 30 Prl
Meelekaart: ühtlane liikumine
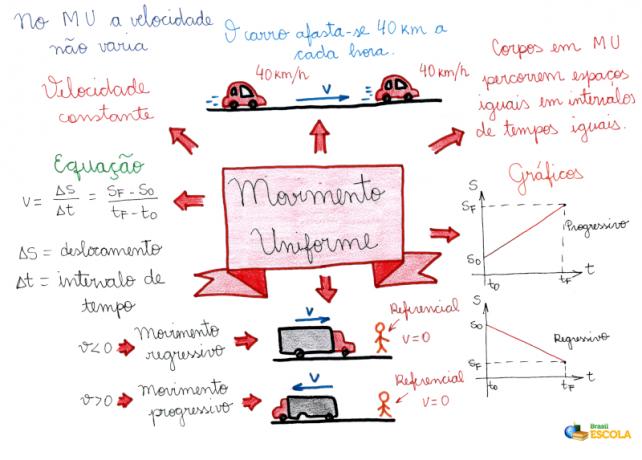
* Mõttekaardi allalaadimiseks PDF-failina Kliki siia!
Ühtne liikumisgraafika
Saame suhestuda mööblieseme asend aja funktsioonina graafika abil. Sujuva liikumise jaoks moodustavad positsiooni ja aja graafikud sirgjooned, mis kalduvad üles või madal, seotud liikumisega progressiivne ja regressiivne, vastavalt. Vaadake näidise graafikut positsiooni ja aja kohta liikumineühtlaneprogressiivne:
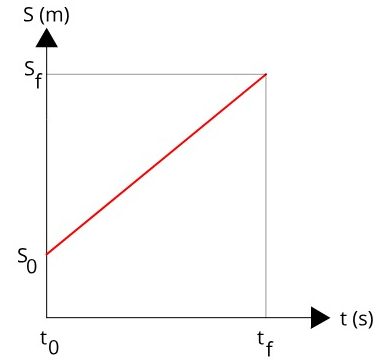
Vaataka:jõud ja liikumine
Alloleval joonisel on meil graafik, mis kujutab a-d sooritava mobiiltelefoni positsiooni aja funktsioonina liikumineühtlane ja regressiivne (või retrograadne).
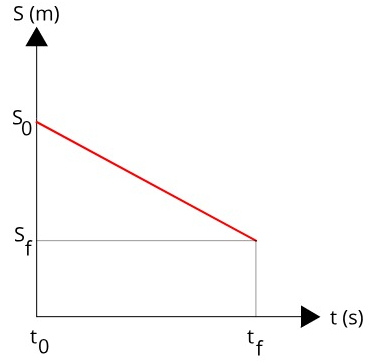
Positsiooni ja aja graafikuid saab kasutada kiirus liikumise kohta. Selleks piisab, kui märkame, et mobiiltelefoni kiiruse annab selle puutuja, see tähendab suhe kraegavastupidine (ΔS) ja külgnev jalg sirgjooneni (Δt).
Ühtlase liikumise graafikud kiiruse ja aja suhtes on omakorda sirged. paralleelselt mooduli horisontaalteljele negatiivne või positiivne, vastavalt teie liigitusele (progressiivne või regressiivne). Kiirusgraafiku kaudu on võimalik arvutada roveri nihe, selleks määrame lihtsalt joone alla jääva ala mooduli:
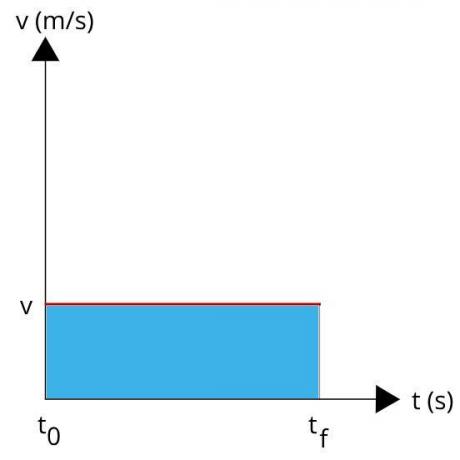
Eelmises graafikus on siniseks värvitud ala arvuliselt võrdne a pindalaga ristkülik. Selle piirkonna saab arvutada järgmise valemi abil:

THE - piirkonnas
B - aluse serv
H - kõrgus
Vaataka: Ühtne liikumisgraafika
ühtlaselt mitmekesine liikumine
O liikumineühtlaseltmitmesugused see on liikumine, mille kiirus aja jooksul pidevalt suureneb või väheneb. Seda tüüpi liikumine ei ole tingimata sirge ja selle suhtes kohaldatakse a kiirendus pidev. Kui soovite MUV-i kohta rohkem teada saada, klõpsake nuppu siin.
Vaataka: Kuidas lahendada kinemaatika harjutusi?
Harjutused ühtlaseks liikumiseks
1) Mobiil algab lähtepositsioonist S0 = - 15 m ja 12 sekundi pärast on see asendis SF = 45 m.
a) Määrake selle mobiili keskmine kiirus.
b) Määrake roveri positsiooni tunnifunktsioon.
c) Arvutage mobiilpositsioon t = 0 s, t = 1 s, t = 2 s, t = 3 s ja t = 4 s jaoks. Seejärel koostage selle käigu jaoks positsiooni ja aja graafik.
d) Hinnake selle mööblieseme kirjeldatud liikumist.
Resolutsioon
) Selle liikumise keskmise kiiruse arvutamiseks kasutame keskmise kiiruse valemit:

Sisestades harjutuse avalduses esitatud andmed, teeme järgmise arvutuse:
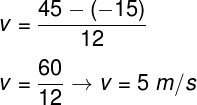
Tulemus näitab, et mobiil liigub 5 meetrit sekundis.
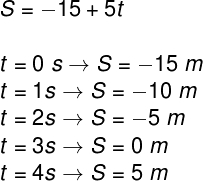
B) Selle liikumise tunnifunktsiooni määramiseks peame lihtsalt tuvastama selle algpositsiooni ja kiiruse. Seejärel asendame need väärtused positsiooni tunnifunktsiooniga:

Harjutusandmete asendamisel on meil järgmine tunnise positsiooni funktsioon:

ç) Arvutame roveri positsiooni iga mainitud ajahetke kohta, kasutades selle tunnise positsiooni funktsiooni:
Selle liikumise graafik on näidatud allpool:
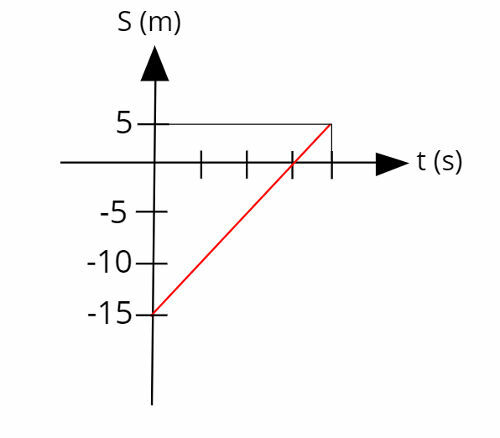
d) Graafikut analüüsides on võimalik näha, et mobiil läheneb referentsile instantside t = 0 s ja t = 3 s vahel, alates 3 s hakkab mobiil eemalduma. Seetõttu on liikumine 0–3 s ja 3 s edasi progresseeruv.
Minu poolt. Rafael Helerbrock
Allikas: Brasiilia kool - https://brasilescola.uol.com.br/fisica/movimento-uniforme.htm