Kiirusvektor see on mõõt, millega teatud ajavahemikul teatud vahemaa läbitakse, kui võtame arvesse vektorparameetreid, näiteks suurust, suunda ja suunda. Kiirusevektori saab arvutada nihkevektori järgi - vahe vektorid lõpp- ja algpositsioon - jagatud ajaintervalliga, milles liikumine toimus.
Vaataveel: Staatiline tasakaal: kui jõudude tulemus ja pöördemomentide summa on null
Vektorkiiruse määratlus
erinevalt kiirusest ronima, vektorite keskmine kiirus see võib olla null, isegi kui keha liigub. See juhtub juhtudel, kui mobiil algab asukohast ja naaseb teatud aja möödudes samale positsioonile. Sel juhul ütleme, et isegi kui roveri läbitud ruum ei olnud null, oli vektori nihe siiski.liikumine.võib olla null, isegi kui keha on sees, vektorite keskmine kiirus ronimaerinevalt kiirusest
Valemi arvutamiseks kasutatud valem kiirusvektor mõnest mööblist on see:

v - vektori kiirus
S - vektori nihe
t - ajavahemik
vektori nihe
me helistame sF ja s0, vastavalt positsioonid, milles mobiil oli liikumise lõpus ja alguses. Neid seisukohti saab kirjutada kujul
punkti Karteesia lennuk(x, y), nii et saame arvuta vektori nihe, võttes arvesse iga punkti x ja y koordinaatide vahekaugust.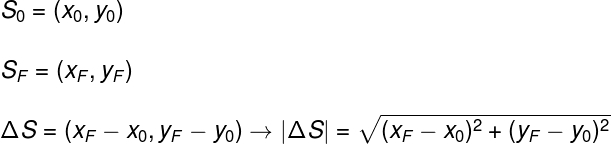
Teine võimalus nihkevektori kirjutamiseks on vektoridühtne (vektor, mis osutab suundades x, y või z ja mille moodul on 1). Ühikvektoreid kasutatakse iga nihke või kiiruse komponendi suuruse määratlemiseks juhiseidhorisontaalne ja vertikaalne, mida tähistatakse vastavalt sümbolitega i ja j.
Ärge lõpetage kohe... Peale reklaami on veel;)
Järgmisel joonisel näitame selles asendis olnud mobiiltelefoni nihkevektori komponente s0 = 4,0i + 3,0j, ja liigub siis asendisse sF = 6,0i ja 10,0j. Nihe on antud juhul antud asendite vahe ja on võrdne ΔS = 2,0i + 7,0j.

teades kiirusvektori komponendid, on võimalik arvutada moodulkohtanihe, selleks peame kasutama Pythagorase teoreem, kuna need komponendid on üksteisega risti, pange tähele:

Kui oleme leidnud nihkevektori suuruse, vektori kiirus saab arvutada, jagades selle ajavahemikuga.
näe rohkem: Jõud: dünaamika esindaja, kes vastutab keha puhkeseisundi või liikumisseisundi muutmise eest
vektori kiirus ja skalaarne kiirus
Nagu mainitud, on kiirus vektor suurus, seega määratletakse selle suurus, suund ja suund. Kogu kiirus on vektor, kuid enamikus õpikutes kasutatakse uurimise hõlbustamiseks mõistet “skalaarne kiirus” kinemaatika keskkooliõpilastele. See ütles, see “Ronimise” kiirus see on tegelikult ruumis ühes suunas liikuva kulguri kiiruse suurus.
Keskmine ja hetkekiirus
Keskmine kiirus on suhe vektori nihke ja ajavahemiku vahel, milles see nihe toimub. Kui arvutame keskmine kiirus, ei näita saadud tulemus, et see püsis kogu reisi vältel ja võib olla aja jooksul varieerunud.
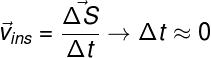
THE hetkekiiruson omakorda seatud väärtusele vaheajadaastalaeglõpmatu väike, st väga väike. Hetkekiiruse määratlus viitab seetõttu kiirusele mõõtaannabkiirusaastaligakohene:
Harjutused vektori kiirusel
1. küsimus) (Mackenzie) Lennuk, olles läbinud 120 km kirdes (NE), liigub 160 km kagusse (SE). Kuna veerand tundi oli selle reisi kogu aeg, oli selle aja keskmise lennuki vektorkiiruse moodul:
a) 320 km / h
b) 480 km / h
c) 540 km / h
d) 640 km / h
e) 800 km / h
Mall: Täht e
Resolutsioon:
Põhja- ja kirdesuunad on üksteisega risti, seega arvutame Pythagorase teoreemi abil selle tasapinna vektornihke. Pange tähele järgmist joonist, mis illustreerib kirjeldatud olukorda ja esialgu tehtavat arvutust:

Pärast vektori nihke mooduli arvutamist arvutage lihtsalt keskmine vektori kiirus, jagades selle ajaintervalliga, mis on ¼ tund (0,25 h):

Selle põhjal leiame, et lennuki kiirus on 800 km / h, seega on õige alternatiiv e-täht.
Küsimus 2) (Ufal) Järve asukoht eelajaloolise koopa suhtes eeldas 200 m käimist kindlas suunas ja seejärel 480 m esimesega risti. Koobast järveni oli sirgjooneline kaugus meetrites,
a) 680
b) 600
c) 540
d) 520
e) 500
Mall: D-täht
Resolutsioon:
Harjutus räägib kahest risti asetsevast nihkest. Lõpliku ja alguspunkti vahelise kauguse leidmiseks peame kasutama Pythagorase teoreemi, pange tähele:

Saadud tulemuse järgi on õige alternatiiv täht d.
Küsimus 3) (Uemg 2015) Aeg on voolav jõgi. Aeg pole kell. Ta on nii palju enamat. Aeg möödub olenemata sellest, kas teil on käekell või mitte. Inimene soovib ületada jõe kohas, kus kallaste vahe on 50 m. Selleks orienteerub ta oma paati kaldaga risti. Oletame, et paadi kiirus vee suhtes on 2,0 m / s ja voolu kiirus 4,0 m / s. Selle paadi ületamise kohta märkige linnuke ÕIGE:
a) Kui voolu ei oleks, kuluks paadil jõe ületamiseks 25 sekundit. Voolu korral kuluks paadil ületamiseks rohkem kui 25 s.
b) Kuna paadi kiirus on kallastega risti, ei mõjuta vool ületamise aega.
c) Ülesõiduaega ei mõjutaks vool mitte mingil juhul.
d) Praeguse voolu korral oleks paadi ületamise aeg väiksem kui 25 s, kuna see suurendab vektoriga paadi kiirust.
Mall: Täht C
Resolutsioon:
Sõltumata praegusest kiirusest on paadi ületamise aeg sama, kuna see ristub kaldadega risti.

Mõistke: paadi kahe kiiruse koosseis põhjustab selle liikumise nendest tulenevas suunas, seega risti 50 m pikkust jõge katab alati paadi kiirus, mis on 2,0 m / s, ja seetõttu ei ole ülesõiduaeg mõjutatud.
Autor Rafael Hellerbrock
Füüsikaõpetaja