
Vektor ist die Darstellung, die Betrag, Richtung und Richtung einer Vektorgröße bestimmt. Vektoren sind gerade Segmente, die an einem Ende durch einen Pfeil ausgerichtet sind.
Wir benennen die Vektoren mit einem Buchstaben und einem kleinen Pfeil.
Vektoren charakterisieren Vektorgrößen, das sind Größen, die eine Orientierung benötigen, dh Richtung und Richtung. Einige Beispiele sind: Kraft, Geschwindigkeit, Beschleunigung und Weg. Der Zahlenwert reicht nicht aus, es muss beschrieben werden, wo diese Größen wirken.
Modul eines Vektors
Der Modul oder die Intensität des Vektors ist sein numerischer Wert, gefolgt von der Maßeinheit für die Größe, die er repräsentiert, zum Beispiel:
Wir geben das Modul zwischen den Balken an, bei dem der Pfeil oder nur der Buchstabe ohne Balken und ohne Pfeil bleibt.
Die Länge des Vektors ist proportional zum Modul. Ein größerer Vektor repräsentiert einen größeren Modul.
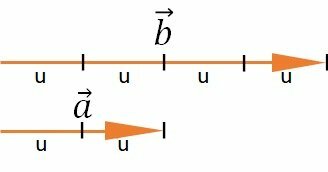
das Vektormodul ist 4 Einheiten, während Vektor
beträgt 2 Einheiten.
Richtung eines Vektors
Die Richtung des Vektors ist die Steigung der Stützlinie, auf der er bestimmt wird. Für jeden Vektor gibt es nur eine Richtung.
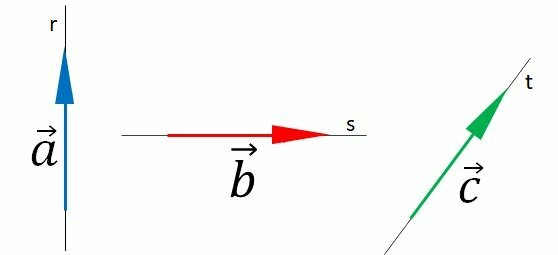
Sinn für einen Vektor
Die Richtung des Vektors wird durch den Pfeil angezeigt. Dieselbe Richtung kann zwei Richtungen enthalten, z. B. nach oben oder unten und nach links oder rechts.
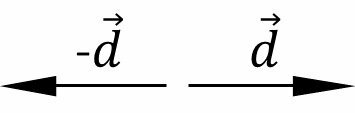
Wird eine Richtung als positiv angenommen, wird die entgegengesetzte Richtung, negativ, mit einem Minuszeichen vor dem Vektorsymbol dargestellt.
Resultierender Vektor
Der resultierende Vektor ist das Ergebnis von Vektoroperationen und entspricht einer Menge von Vektoren. Es ist praktisch, den Vektor zu kennen, der den von mehr als einem Vektor erzeugten Effekt repräsentiert.
Zum Beispiel kann ein Körper einer Reihe von Kräften ausgesetzt sein und wir möchten wissen, welches Ergebnis sie alle zusammen auf diesen Körper erzeugen. Jede Kraft wird durch einen Vektor dargestellt, aber das Ergebnis kann nur durch einen Vektor dargestellt werden: den resultierenden Vektor.

Der resultierende Vektor, , von horizontaler Richtung und Richtung nach rechts, ist das Ergebnis von Additionen und Subtraktionen der Vektoren.
,
,
und
. Der resultierende Vektor zeigt eine Tendenz des Körpers, sich in dieser Ausrichtung zu bewegen.
Die Vektoren mit vertikaler Richtung haben die gleiche Größe, dh den gleichen Modul. Da sie gegensätzliche Bedeutungen haben, heben sie sich gegenseitig auf. Dies zeigt, dass die Kiste in vertikaler Richtung nicht bewegt wird.
Bei der Analyse der Vektoren und
, die die gleiche Richtung und entgegengesetzte Richtungen haben, erkennen wir, dass ein Teil der Kraft rechts "bleibt", da der Vektor
ist größer als die
, das heißt, das Modul von
es ist größer.
Um den resultierenden Vektor zu bestimmen, führen wir Vektoradditions- und -subtraktionsoperationen durch.
Addition und Subtraktion von Vektoren mit gleicher Richtung
Mit gleiche Sinne, wir fügen die Module hinzu und behalten die Richtung und Richtung bei.
Beispiel:
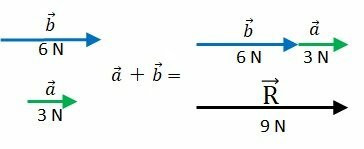
Grafisch platzieren wir die Vektoren nacheinander, ohne ihre Module zu ändern. Der Anfang des einen muss mit dem Ende des anderen übereinstimmen.
Die Kommutativeigenschaft der Addition ist gültig, da die Reihenfolge das Ergebnis nicht ändert.
Mit gegensätzliche Sinne, wir subtrahieren die Module und behalten die Richtung bei. Die Richtung des resultierenden Vektors ist die des Vektors mit dem größten Modul.
Beispiel: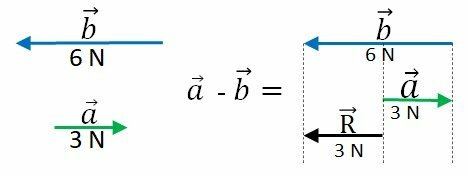
der Vektor ist der übrig gebliebene Teil von
, nach dem Rückzug
.
Das Subtrahieren eines Vektors entspricht dem Addieren mit dem Gegenteil des anderen.
Addition und Subtraktion von senkrechten Vektoren
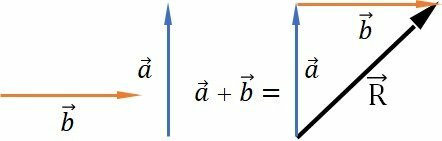
Um zwei Vektoren mit senkrechten Richtungen zu addieren, verschieben wir die Vektoren, ohne ihren Modulus zu ändern, so dass der Anfang des einen mit dem Ende des anderen übereinstimmt.
Der resultierende Vektor verbindet den Anfang des ersten mit dem Ende des zweiten.
Um die Größe des resultierenden Vektors zwischen zwei senkrechten Vektoren zu bestimmen, vergleichen wir den Anfang der beiden Vektoren.
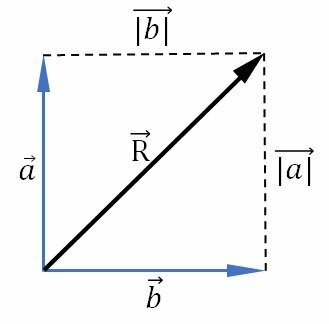
Der Modul des resultierenden Vektors wird durch den Satz des Pythagoras bestimmt.
Addition und Subtraktion von schrägen Vektoren
Zwei Vektoren sind schräg, wenn sie zwischen ihren Richtungen einen anderen Winkel als 0°, 90° und 180° bilden. Um schräge Vektoren zu addieren oder zu subtrahieren, werden die Parallelogramm- und Polygonallinien-Methoden verwendet.
Parallelogramm-Methode
Um die Methode oder Regel des Parallelogramms zwischen zwei Vektoren auszuführen und den resultierenden Vektor zu zeichnen, folgen wir diesen Schritten:
Der erste Schritt besteht darin, ihre Ursprünge am selben Punkt zu positionieren und Linien parallel zu den Vektoren zu zeichnen, um ein Parallelogramm zu bilden.
Die zweite besteht darin, einen diagonalen Vektor auf dem Parallelogramm zwischen der Vereinigung von Vektoren und der Vereinigung paralleler Linien zu zeichnen.

Die gestrichelten Linien verlaufen parallel zu den Vektoren und die gebildete geometrische Figur ist ein Parallelogramm.
Der resultierende Vektor ist die Linie, die den Ursprung der Vektoren mit den Parallelen verbindet.
Ö Modul des resultierenden Vektors wird durch das Kosinusgesetz erhalten.
Woher:
R die Größe des resultierenden Vektors ist;
a ist das Vektormodul ;
b ist der Modul des Vektors ;
ist der Winkel, der zwischen den Richtungen der Vektoren gebildet wird.
Die Parallelogrammmethode wird verwendet, um ein Vektorpaar hinzuzufügen. Wenn Sie mehr als zwei Vektoren hinzufügen möchten, müssen Sie sie zu zweit hinzufügen. Zu dem aus der Summe der ersten beiden resultierenden Vektor addieren wir den dritten und so weiter.
Eine andere Möglichkeit, mehr als zwei Vektoren hinzuzufügen, besteht darin, die Polygonlinienmethode zu verwenden.
polygonale Linienmethode
Die Polygonallinienmethode wird verwendet, um den Vektor zu finden, der sich aus der Addition von Vektoren ergibt. Diese Methode ist besonders nützlich, wenn mehr als zwei Vektoren hinzugefügt werden, wie zum Beispiel die folgenden Vektoren ,
,
und
.
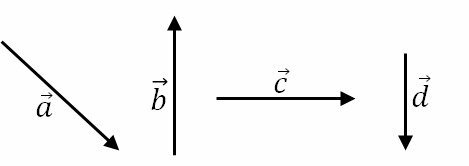
Um diese Methode zu verwenden, müssen wir die Vektoren so anordnen, dass das Ende des einen (Pfeil) mit dem Anfang des anderen übereinstimmt. Es ist wichtig, das Modul, die Richtung und die Richtung zu erhalten.
Nachdem wir alle Vektoren in Form einer polygonalen Linie angeordnet haben, müssen wir den resultierenden Vektor vom Anfang des ersten bis zum Ende des letzten verfolgen.
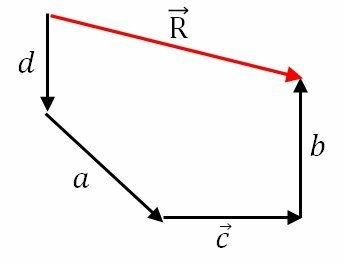
Es ist wichtig, dass der resultierende Vektor das Polygon schließt, wobei sein Pfeil mit dem Pfeil im letzten Vektor zusammenfällt.
Die Kommutativeigenschaft ist gültig, da die Reihenfolge, in der wir die Plotvektoren platzieren, den resultierenden Vektor nicht ändert.
Vektorzerlegung
Einen Vektor zu zerlegen bedeutet, die Komponenten zu schreiben, aus denen dieser Vektor besteht. Diese Komponenten sind andere Vektoren.
Jeder Vektor kann als Zusammensetzung anderer Vektoren durch eine Vektorsumme geschrieben werden. Mit anderen Worten, wir können einen Vektor als die Summe zweier Vektoren schreiben, die wir Komponenten nennen.
Mit einem kartesischen Koordinatensystem mit senkrechten x- und y-Achsen bestimmen wir die Komponenten des Vektors.
der Vektor ist das Ergebnis der Vektorsumme zwischen den Komponentenvektoren.
und
.
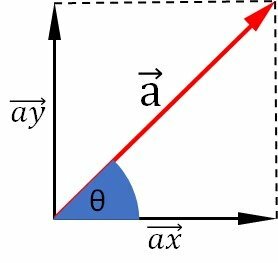
der Vektor Schieflage
bildet mit der x-Achse ein rechtwinkliges Dreieck. Daher bestimmen wir die Module der Komponentenvektoren mittels Trigonometrie.
Komponentenmodul Axt.
Komponentenmodul ay.
das Vektormodul ergibt sich aus dem Satz des Pythagoras.
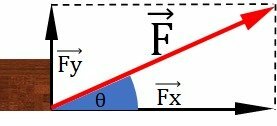
Beispiel
Eine Kraft wird ausgeübt, indem ein Block aus dem Boden gezogen wird. Die Modulkraft von 50 N ist um 30° aus der Horizontalen geneigt. Bestimmen Sie die horizontalen und vertikalen Komponenten dieser Kraft.
Daten:
Multiplikation einer reellen Zahl mit einem Vektor
Durch die Multiplikation einer reellen Zahl mit einem Vektor entsteht ein neuer Vektor mit folgenden Eigenschaften:
- Gleiche Richtung, wenn die reelle Zahl ungleich Null ist;
- Gleiche Richtung, wenn die reelle Zahl positiv ist, und in die entgegengesetzte Richtung, wenn sie negativ ist;
- Der Modul ist das Produkt des Moduls der reellen Zahl und des Moduls des multiplizierten Vektors.
Produkt zwischen einer reellen Zahl und einem Vektor
Woher: der aus der Multiplikation resultierende Vektor ist;
ist die reelle Zahl;
ist der Vektor, der multipliziert wird.
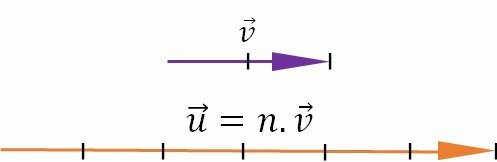
Beispiel
Sei die reelle Zahl n = 3 und der Vektor von Modulo 2 ist das Produkt zwischen ihnen gleich:
Modulberechnung
Die Richtung und die Richtung werden gleich sein.
Übung 1
(Enem 2011) Die Reibungskraft ist eine Kraft, die vom Kontakt zwischen Körpern abhängt. Sie kann als Gegenkraft zur Verschiebungstendenz von Körpern definiert werden und wird durch Unregelmäßigkeiten zwischen zwei sich berührenden Oberflächen erzeugt. In der Abbildung stellen die Pfeile Kräfte dar, die auf den Körper wirken, und der vergrößerte Punkt repräsentiert die Unregelmäßigkeiten, die zwischen den beiden Oberflächen bestehen.

In der Abbildung sind die Vektoren, die die Kräfte darstellen, die Verschiebung und Reibung verursachen, jeweils:
Die) 
B) 
C) 
D) 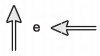
und) 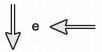
Richtige Antwort: Buchstabe a) 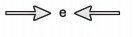
Die Pfeile stellen die Kraftvektoren dar, die bei der Bewegung in horizontaler Richtung wirken, da sie ein Aktions-Reaktions-Paar sind, haben sie entgegengesetzte Richtungen.
Die vertikalen Pfeile stellen die Wirkungen der Gewichtskraft und der Normalkraft dar und heben sich, da sie gleich sind, ohne Bewegung in vertikaler Richtung auf.
Übung 2
(UEFS 2011) Das Vektordiagramm in der Abbildung skizziert die Kräfte, die von zwei Gummibändern auf einen Zahn einer kieferorthopädischen Person ausgeübt werden.
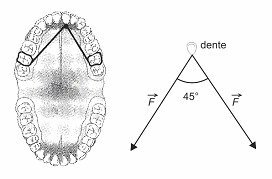
Unter der Annahme von F = 10.0N, sen45° = 0.7 und cos45° = 0.7 ist die Stärke der Kraft, die von den Gummizügen auf den Zahn ausgeübt wird, in N gleich
a) 3√10
b) 2√30
c) 2√85
d) 3√35
e) 2√45
Richtige Antwort: c) 2√85
Die Stärke der auf den Zahn ausgeübten Kraft wird durch das Kosinusgesetz bestimmt.
a und b sind gleich 10 N.
Wenn wir die Quadratwurzel faktorisieren, erhalten wir:
Daher ist die Intensität der resultierenden Kraft, die von den Gummibändern auf den Zahn ausgeübt wird, .
Übung 3
(PUC RJ 2016) Die Kräfte F1, F2, F3 und F4 in der Abbildung bilden einen rechten Winkel zueinander und ihre Module sind jeweils 1 N, 2 N, 3 N und 4 N.
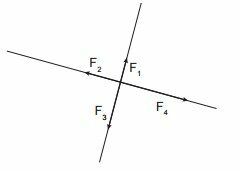
Berechnen Sie den Modul der Nettokraft in N.
a) 0
b) 2
c) 2
d) 2√ 2
e) 10
Richtige Antwort: d) 2√ 2
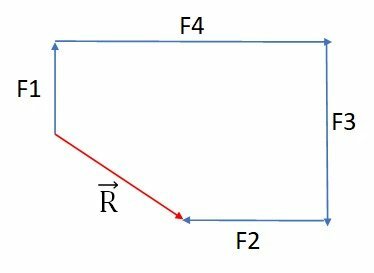
Wir verwenden die polygonale Linienmethode, um den resultierenden Vektor zu bestimmen. Dazu ordnen wir die Vektoren so um, dass das Ende des einen mit dem Anfang des anderen übereinstimmt:
Mit einem Koordinatensystem mit Ursprung am Anfang des resultierenden Vektors können wir die Module seiner Komponenten wie folgt bestimmen:
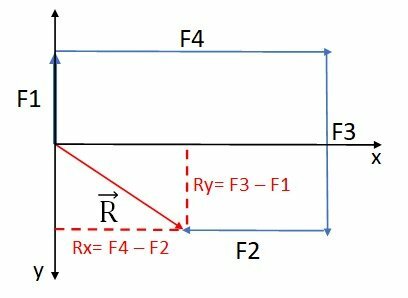
Somit müssen wir:
Ry = 3 - 1 = 2 N
Rx = 4 - 2 = 2 N
Die Größe des resultierenden Vektors wird durch den Satz des Pythagoras bestimmt.
Daher ist der Modul der Nettokraft gleich .
Lerne mehr über
- Vektoren: Addition, Subtraktion und Zerlegung.
- Vektormengen
✖


