O bevægelseuniform opstår, når et møbel bevæger sig ind lige linje og med hastighedkonstant. I ensartet bevægelse rejser mobilen mellemrumlige med i pauseraf samme tid.
Se også: Introduktion til kinematik
Forestil dig følgende situation: et køretøj, der kører ind bevægelseuniform, med hastigheden på 20km / t, vil være flyttet fra sin oprindelige position i 10kmi en tidsperiode på 0,5H (30 minutter). Om 1 time vil dette samme køretøj være flyttet væk fra dets oprindelige position i 20km.
Alle bevægelseruniformerskalat forekommeilinjelige, siden i denne type bevægelse Der er ikke acceleration. Forstå: for at et møbel skal gennemgå en ændring i dets kørselsretning, er det nødvendigt, at en styrke handle på det ved at udskrive a acceleration og få mobilen til at få en ny hastighedskomponent.
Ensartede bevægelsesformler
Tjek nogle formler, der bruges til at beskrive ensartet bevægelse og forstå betydningen af hver af dens variabler:

S - møbelets slutposition
s0 - mobil home position
v - mobil hastighed
t - tids interval

v - gennemsnitshastighed
S - forskydning
t - tids interval
Referencer og klassificering af bevægelsen
For korrekt at definere bevægelsen af et legeme er det nødvendigt at vælge en referenceramme. I fysik forstår vi, at henvisning er den position, observatøren befinder sig i. Figuren nedenfor viser nogle køretøjer, der bevæger sig i forskellige retninger i vandret retning.
Referencerammen vedtaget i figuren (markeret med punkt 0) er, hvor observatøren er. Ifølge denne reference er bilerne til venstre i positionernegativ, mens bilerne til højre er i positionerpositiv.

Henvisningen angiver bevægelsens retning.
Det er vigtigt at indse det valg af en anden reference ville indebære ændring af hvert køretøjs startpositioner og også klassificeringen af deres bevægelser. Figuren nedenfor viser, hvad den valgte ramme opfatter: for det, den orange bil og sølvbilen til venstre bevæger sig væk, mens sølvbilen til højre nærmer sig den..
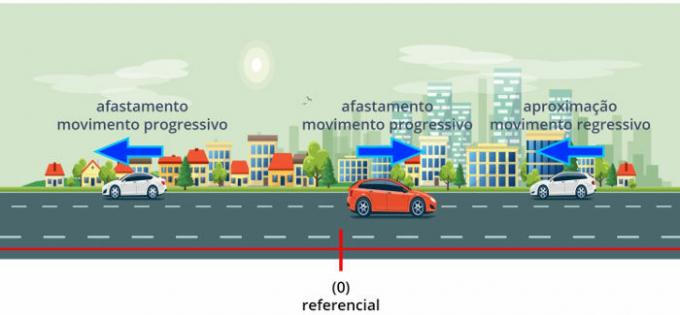
Vi siger, at når et møbel nærmer sig sin referenceramme, er dets bevægelse det regressiv. Hvis mobilen bevæger sig væk fra sin reference, er dens bevægelse det progressiv. Derudover tilskriver vi bevægelseprogressiv O signalpositiv for hastighed. Til den regressive bevægelse, vi bruger signalnegativ, hvilket indikerer, at afstanden mellem mobilen og dens reference falder med tiden.
Progressiv og retrograd bevægelsesvideo klasse
Gennemsnitshastighed
En rovers gennemsnitshastighed er angivet ved forskydningsforholdet (AS) i det tidsinterval, hvor bevægelsen fandt sted. Forskydningen (ΔS) er til gengæld givet ved forskellen mellem positionerEndelig og initial af møblerne.

v - gennemsnitshastighed
S - forskydning
t - tids interval
I formlen for gennemsnitshastigheden kalder vi ΔS for forskydning. Forskydningen af et møbel kan let beregnes, hvis vi ved, hvor det kom fra (S0 - startposition) og hvor han ankom (Sf —End position) i slutningen af bevægelsen, som er afgrænset af a pauseitid (Δt), beregnet af tidsforskellen mellem øjeblikkeEndelig og initial (Δt = tf - t0). Tjek denne formel mere detaljeret nedenfor:

Hastighedsmåleenheder
Enhedens måleenhed i henhold til International System (SI), og undergrundsbaneomsekund (Frk). Der er dog andre almindelige enheder, såsom kilometeromtime (km / t). Det er let at konvertere meter pr. Sekund til kilometer i timen. at gøre det, bare formere sig eller delehastighedsmodulet med faktor 3.6, som vist i følgende figur:

Eksempler:
72 km / t / 3,6 = 20 Frk
108 km / t /3,6 = 30 Frk
Mind Map: Ensartet bevægelse
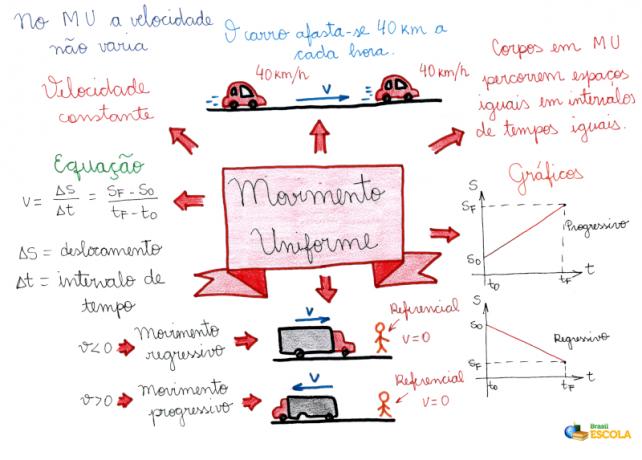
* For at downloade tankekortet i PDF, Klik her!
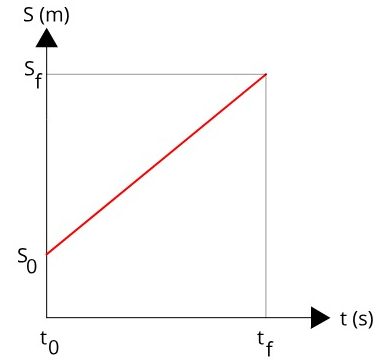
Ensartet bevægelsesgrafik
Vi kan forholde os til placeringen af et møbel som en funktion af tiden ved hjælp af grafikken. For jævn bevægelse danner graferne over position versus tid lige linjer, der skråner til op eller til lav, relateret til bevægelse progressiv og regressiv, henholdsvis. Se et eksempel på en graf over position versus tid for bevægelseuniformprogressiv:
Seogså:kraft og bevægelse
I nedenstående figur har vi en graf, der repræsenterer positionen som en funktion af tiden for en mobil, der udfører en bevægelseuniform og regressiv (eller retrograd).
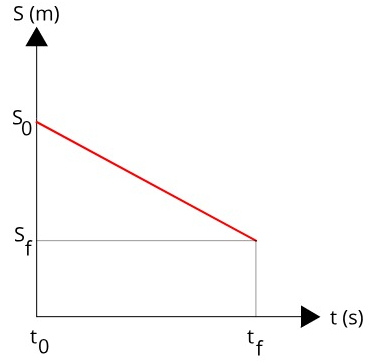
Positionsdiagrammer kan bruges til at bestemme hastighed af bevægelsen. Til dette er det nok at bemærke, at mobilens hastighed er givet ved dens tangens, det vil sige forholdet mellem kravemodsat (ΔS) og tilstødende ben til den lige linje (Δt).
Hastighed versus tid grafer for ensartet bevægelse er til gengæld lige. parallel til modulets vandrette akse negativ eller positiv, i henhold til din klassificering (progressiv eller regressiv). Gennem hastighedsgrafen er det muligt at beregne rovers forskydning, for at gøre dette bestemmer vi simpelthen modulet for området under linjen:
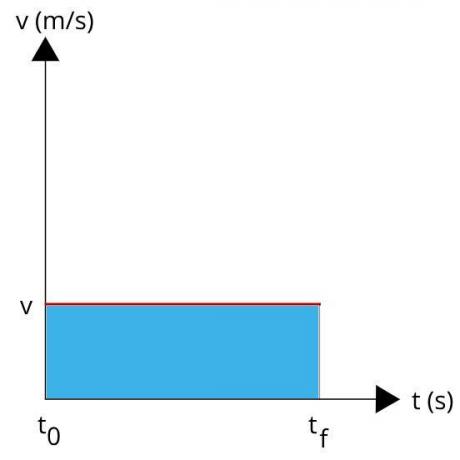
I den forrige graf er det blå malede område numerisk lig med arealet af a rektangelDette område kan beregnes ved hjælp af følgende formel:

DET - areal
B - bundkant
H - højde
Seogså: Ensartet bevægelsesgrafik
jævnt varieret bevægelse
O bevægelsejævntdiverse det er en bevægelse, hvis hastighed stiger eller falder støt over tid. Denne type bevægelse er ikke nødvendigvis lige og er underlagt en acceleration konstant. Hvis du vil vide mere om MUV, skal du klikke på på her.
Seogså: Hvordan løser man kinematikøvelser?
Øvelser på ensartet bevægelse
1) En mobil starter fra startposition S0 = - 15 m og efter 12 sekunder er den i position SF = 45 m.
a) Bestem den gennemsnitlige hastighed for denne mobil.
b) Bestem roverpositionens timefunktion.
c) Beregn mobilpositionen for t = 0 s, t = 1 s, t = 2 s, t = 3 s og t = 4 s. Bygg derefter positionen versus tidsgrafen for det træk.
d) Bedøm den bevægelse, der er beskrevet af dette møbel.
Løsning
Det) For at beregne gennemsnitshastigheden for denne bevægelse bruger vi formlen for gennemsnitshastighed:

Ved at indsætte de data, der leveres af øvelseserklæringen, foretager vi følgende beregning:
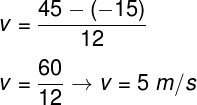
Resultatet indikerer, at mobilen bevæger sig 5 meter hvert sekund.
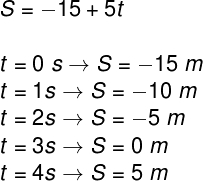
B) For at bestemme timens funktion af denne bevægelse er vi bare nødt til at identificere dens oprindelige position og hastighed. Vi erstatter derefter disse værdier i positionens timefunktion:

Udskiftning af træningsdata har vi følgende timepositionsfunktion:

ç) Lad os beregne roverens position for hver af de nævnte øjeblikke ved hjælp af dens timepositionsfunktion:
Grafen for denne bevægelse er vist nedenfor:
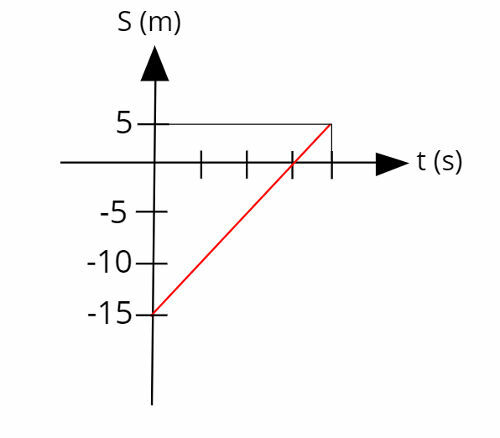
d) Når man analyserer grafen, er det muligt at se, at mobilen nærmer sig referencen mellem øjeblikket t = 0 s og t = 3 s, fra 3 s og fremad begynder mobilen at bevæge sig væk. Derfor er bevægelsen retrograd mellem 0 og 3 s og progressiv 3 s foran.
Af mig Rafael Helerbrock
Kilde: Brasilien skole - https://brasilescola.uol.com.br/fisica/movimento-uniforme.htm